

-
Методы малого параметра (аналитические методы)
Методы малого параметра дают возможность приближенно исследовать устойчивость нелинейных систем, определять амплитуды и частоты автоколебаний в системах, а также устойчивость этих автоколебаний (предельных циклов). Наиболее ранними являются методы Пуанкарэ, Ляпунова. Рэйли и Ван-дер-Поля. Л.И. Мандельштамом, Н.Д. Папалекси и А.А. Андроновым был строго обоснован и метод Ван-дер-Поля, развит метод Пуанкарэ. Б.В. Булгаковым эти методы были распространены на системы высокого порядка. Н.М. Крылов и Н.Н. Боголюбов Разработали принцип так называемого гармонического баланса. Широкое пременим метод Л.С. Гольдфарба, базирующийся на использовании принципа гармонического баланса, хотя он уже относится к графоаналитическим методам.
В![]() первой фазе развития методов малого
параметра рассматривались нелинейные
системы второго порядка. Например,
уравнение лампового генератора может
быть приведено к виду (для относительного
времени):
первой фазе развития методов малого
параметра рассматривались нелинейные
системы второго порядка. Например,
уравнение лампового генератора может
быть приведено к виду (для относительного
времени):
Здесь φ – нелинейная функция x и , μ – некоторое постоянное число, считающееся малый по величине. Это и есть малый параметр. Если μ=0, то уравнение (1) вырождается в простое линейное уравнение
![]() Имеющее
очевидное значение
Имеющее
очевидное значение
![]() ,
где амплитуда А зависит от начальных
условий, а частота ω=1. Между тем при μ≠0,
как следует, например, из эксперимента,
получается автоколебание вида
,
где амплитуда А зависит от начальных
условий, а частота ω=1. Между тем при μ≠0,
как следует, например, из эксперимента,
получается автоколебание вида
![]() ,
где А – определенная амплитуда,
независимая от начальных условий, а
частота ω близка к единице, но несколько
от неё отличается.Автоколебание, как
следует из формулы (4), примерно
синусоидально, если μ не велико.Уравнение
(1) при μ=0 имеет известное решение х0 (3).
При малом μ, не равном нулю, естественно
представить это решение в форме, близкой
к х0,а именно
,
где А – определенная амплитуда,
независимая от начальных условий, а
частота ω близка к единице, но несколько
от неё отличается.Автоколебание, как
следует из формулы (4), примерно
синусоидально, если μ не велико.Уравнение
(1) при μ=0 имеет известное решение х0 (3).
При малом μ, не равном нулю, естественно
представить это решение в форме, близкой
к х0,а именно
![]() ,
где х1, х2 и т.д. – некоторые функции
времени. Если эти функции найдены, то
ограничившись некоторым числом членов
рядя (5), получаем приближенное решение,
обращающееся в частном случае μ=0 в
функцию х0(t) – решением уравнения
линейной консервативной системы (2).
Методы малого параметра имеют
принципиальное ограничение – они и
качественно и количественно предают
хорошо черты явления лишь в том случае,
когда система в известном смысле мало
отличается от консервативной, имеющей
решение, соответствующее μ=0. Если система
сильно отличается от исходной, то методы
малого параметра уже не описывают
достаточно точно происходящие явления
и могут даже дать качественно неверный
результат.
,
где х1, х2 и т.д. – некоторые функции
времени. Если эти функции найдены, то
ограничившись некоторым числом членов
рядя (5), получаем приближенное решение,
обращающееся в частном случае μ=0 в
функцию х0(t) – решением уравнения
линейной консервативной системы (2).
Методы малого параметра имеют
принципиальное ограничение – они и
качественно и количественно предают
хорошо черты явления лишь в том случае,
когда система в известном смысле мало
отличается от консервативной, имеющей
решение, соответствующее μ=0. Если система
сильно отличается от исходной, то методы
малого параметра уже не описывают
достаточно точно происходящие явления
и могут даже дать качественно неверный
результат.
-
Метод гармонического баланса.
М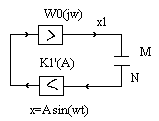 етод
исследования устойчивости систем
содержащих 1 нелинейное усилит звено с
коэффициентом усиления К1’(A) и любую
линейную часть с комплексным коэффициентом
передачи W0(jw). Пусть систем находится
на границе устойчивости и в ней возникают
незатухающие колебания частоты w x –
вход нелинейного звена,- пусть колеблется
с амплитудой А. Разомкнем систему между
точками М и N и подадим на вход синус
колебание х той же амплитуды и частоты.
Тогда выходное колебание Х1 будет
= по амплитуде и обратно по фазе входному
(т.к. система на границе устойчивости)
=> условие возникновения автоколебаний
принимает вид: W(jw)=W0(jw)K1’(A)=-1 или преобразив
– W0(jw)=1/ K1’(A) приравнивая, мнимую и
действительную части 0 получаем 2
уравнения с неизвестной частотой и
амплитудой автоколебаний. Решаем их,
если в результате получим положение
действительного значения, то автоколебаний
возможны. Можно решать графически. Строя
W0(jw) и -1/ K1’(A) точки пересечения определяют
частоту и амплитуду автоколебаний. Если
не пересекает, то нет автоколебаний,
если касаются, то система находится на
границе устойчивости. Уменьшая величину
W0(jw) можно избежать пересечения, и сделать
систему устойчивой. Пересечение кривых
указ лишь на возможность существование
в системе автоколебаний, предельный
цикл реализуем в системе лишь, когда он
устойчив.
етод
исследования устойчивости систем
содержащих 1 нелинейное усилит звено с
коэффициентом усиления К1’(A) и любую
линейную часть с комплексным коэффициентом
передачи W0(jw). Пусть систем находится
на границе устойчивости и в ней возникают
незатухающие колебания частоты w x –
вход нелинейного звена,- пусть колеблется
с амплитудой А. Разомкнем систему между
точками М и N и подадим на вход синус
колебание х той же амплитуды и частоты.
Тогда выходное колебание Х1 будет
= по амплитуде и обратно по фазе входному
(т.к. система на границе устойчивости)
=> условие возникновения автоколебаний
принимает вид: W(jw)=W0(jw)K1’(A)=-1 или преобразив
– W0(jw)=1/ K1’(A) приравнивая, мнимую и
действительную части 0 получаем 2
уравнения с неизвестной частотой и
амплитудой автоколебаний. Решаем их,
если в результате получим положение
действительного значения, то автоколебаний
возможны. Можно решать графически. Строя
W0(jw) и -1/ K1’(A) точки пересечения определяют
частоту и амплитуду автоколебаний. Если
не пересекает, то нет автоколебаний,
если касаются, то система находится на
границе устойчивости. Уменьшая величину
W0(jw) можно избежать пересечения, и сделать
систему устойчивой. Пересечение кривых
указ лишь на возможность существование
в системе автоколебаний, предельный
цикл реализуем в системе лишь, когда он
устойчив.