

-
Понятие переходного процесса. Оценка качества системы по переходной характеристике.
П ереходный
процесс – это процесс перевода системы
из начального положения (с нулевыми
начальными условиями), в некоторое
установившееся положение при подаче
на систему единичного воздействия.
ереходный
процесс – это процесс перевода системы
из начального положения (с нулевыми
начальными условиями), в некоторое
установившееся положение при подаче
на систему единичного воздействия.
Переходный процесс характеризуется показателями качества.
Показатели качества в переходном режиме делятся на прямые и косвенные показатели.
Прямыми показателями качества называют числовые показатели, которые определяются по переходной характеристике. Показатели качества, определяемые не по переходной характеристике, называют косвенными.
Прямые показатели качества.
Время регулирования tp – минимальное время, по истечении которого отклонение переходной характеристики от установившегося значения h(∞) не превышает заданной величины . Обычно принимают = (0,02-0,1)* h(∞).
Перерегулированием называют максимальное отклонение переходной характеристики от установившегося значения, выраженное в процентах к установившемуся значению:
![]()
Для определения прямых показателей качества необходимо иметь график переходной характеристики.
Косвенные показатели качества.
К![]() орневым
показателем качества является степень
устойчивости
орневым
показателем качества является степень
устойчивости
где zv – корни характеристического уравнения. Степень устойчивости является косвенной мерой быстродействия системы.
Суммарной квадратической ошибкой называется ряд
![]()
![]()
Частотные показатели – запас устойчивости по амплитуде и запас устойчивости по фазе.
Дискретные
системы, в которых переходный процесс
заканчивается за конечное число шагов,
то есть существует такое положительное
число l0, что
![]() Такое процесс называется оптимальным,
а система, в которой происходит такое
процесс, называется оптимальной
системой (по переходному процессу).
Такое процесс называется оптимальным,
а система, в которой происходит такое
процесс, называется оптимальной
системой (по переходному процессу).
-
Методы построения переходного процесса.
Целесообразно
использовать методы, позволяющие
определить вид ПП характеристики без
построения всей кривой процесса (так
проще). Это можно сделать по вещественной
частотной характеристике P(ω)
замкнутой системы, которая используется
для построения ПП. При этом предполагается,
что ПП y(t)
вызван скачком задающим воздействием
g(t). Возможна
оценка вида ПП при приложении скачка
возмущения f(t)
в этом случае необходимо использовать
вещественную часть частотной ПП функции
системы по возмущающему воздействию
![]()
Ч![]() астотный
метод. Есть возможность определить
Фурье изображение выходной величины
системы по заданному Фурье изображению
входной системы.
астотный
метод. Есть возможность определить
Фурье изображение выходной величины
системы по заданному Фурье изображению
входной системы.
M ax
Am
АЧХ и ширина wn
полоса частот пропускаемых системой,
является величинами по которым можно
судить о поведении системы при ПП.
ax
Am
АЧХ и ширина wn
полоса частот пропускаемых системой,
является величинами по которым можно
судить о поведении системы при ПП.
М етод
распределенных корней. Используется,
если известны 0 изображения Лапласа
X(s), а также
некоторые сведения о расположении
полюсов этого изображении на комплексной
плоскости, узнать некоторые черты
переходного процесса
етод
распределенных корней. Используется,
если известны 0 изображения Лапласа
X(s), а также
некоторые сведения о расположении
полюсов этого изображении на комплексной
плоскости, узнать некоторые черты
переходного процесса
![]() .
Если система устойчива, то все нули
многочлена N(s)
находятся в левой полуплоскости. Можно
найти v – затухание или
степень устойчивости системы. Чем оно
больше, тем быстрее затухает ПП. μ= tg(φ)-
колебательность:
.
Если система устойчива, то все нули
многочлена N(s)
находятся в левой полуплоскости. Можно
найти v – затухание или
степень устойчивости системы. Чем оно
больше, тем быстрее затухает ПП. μ= tg(φ)-
колебательность:
И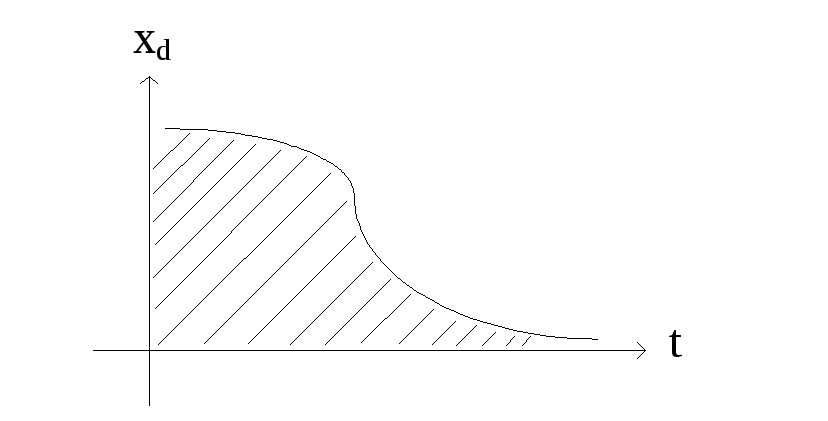 нтегральный
метод
нтегральный
метод
График xd(t) для случая монотонного ПП. Заштрихованная площадь:
![]() Эту
площадь можно считать косвенным критерием
ПП. Чем быстрее протекает ПП, тем меньше
площадь. Рассмотренный критерий имеет
существенный недостаток: зная величину
какого-либо интеграла в общем случае
нельзя высказать строгие суждения о
характере ПП, поэтому появился обобщенный
интегральный критерий:
Эту
площадь можно считать косвенным критерием
ПП. Чем быстрее протекает ПП, тем меньше
площадь. Рассмотренный критерий имеет
существенный недостаток: зная величину
какого-либо интеграла в общем случае
нельзя высказать строгие суждения о
характере ПП, поэтому появился обобщенный
интегральный критерий:
![]()
![]() ,
где: V – квадратичная
форма от переменных характеризующих
состояние системы Физический смысл
интеграла: выбирая параметры минимизации,
мы запрещаем длительное существование
значительных отклонений xd
и запрещаем длительное существование
больших значений производных
,
где: V – квадратичная
форма от переменных характеризующих
состояние системы Физический смысл
интеграла: выбирая параметры минимизации,
мы запрещаем длительное существование
значительных отклонений xd
и запрещаем длительное существование
больших значений производных
![]() .
Т.о. получается быстрый и плавный ПП.
.
Т.о. получается быстрый и плавный ПП.