

-
Критерий устойчивости Михайлова.
 ;
;
![]() ;
;
![]()
![]()
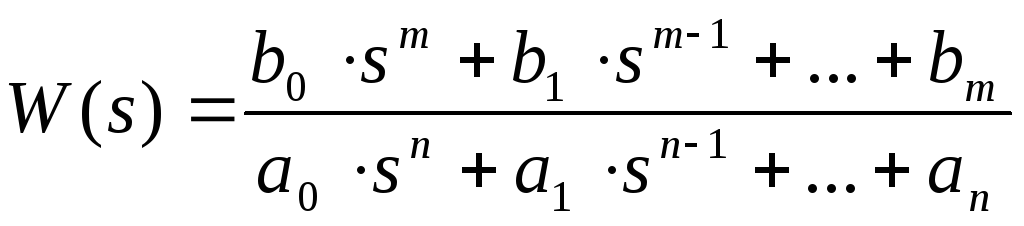
Годограф характеристического вектора D(jw), т.е. кривую, которую описывает характеристический вектор при изменении частоты от 0 до бесконечности, называют кривой Михайлова. При an > 0 кривая Михайлова начинается в положительной вещественной полуоси.
Для устойчивости, необходимо и достаточно, чтобы при а0 > 0 ее кривая Михайлова, начинаясь с положительной вещественной полуоси, последовательно обходила n квадрантов в положительном направлении (против часовой стрелки).
Кривые Михайлова устойчивых систем не пересекают начало координат и уходят в бесконечность в n-том квадранте.
Чем дальше от границы устойчивости ( от начала координат) тем больше запас устойчивости.
-
Критерий Найквиста.
Критерий Найквиста используется для исследования устойчивости замкнутых систем.
Для того, чтобы замкнутая система с отрицательной обратной связью была устойчива, необходимо и достаточно, чтобы амплитудно-фазовая частотная характеристика (АФЧХ) разомкнутой системы охватывала точку (-1; j0) в положительном направлении l/2 раз, где l – число правых корней характеристического уравнения разомкнутой системы.
Здесь предполагается, что у характеристического уравнения разомкнутой системы l корней являются правыми, а остальные n-l корней являются левыми.
Е сли
разомкнутая система устойчива, то для
устойчивости замкнутой устойчивости
системы с отрицательной обратной связью
необходимо и достаточно, чтобы АФЧХ
разомкнутой системы не охватывала точку
(-1; j0).
сли
разомкнутая система устойчива, то для
устойчивости замкнутой устойчивости
системы с отрицательной обратной связью
необходимо и достаточно, чтобы АФЧХ
разомкнутой системы не охватывала точку
(-1; j0).
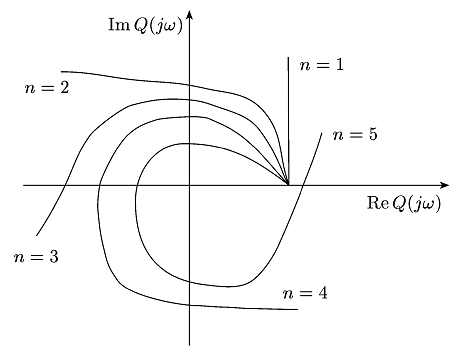
Случай наличия нулевых корней.
Если характеристическое уравнение разомкнутой системы имеет нулевые корни, то есть ее передаточную функцию можно представить в виде
т![]() о
АФЧХ при
о
АФЧХ при
![]() уходит в бесконечность. В этом случае
АФЧХ дополняется дугой
уходит в бесконечность. В этом случае
АФЧХ дополняется дугой
![]() окружности бесконечно большого радиуса.
И для устойчивости замкнутой системы
АФЧХ должна l/2 раз охватывать
или при l=0 (разомкнутая
система устойчива) не охватывать точку
(-1; j0).
окружности бесконечно большого радиуса.
И для устойчивости замкнутой системы
АФЧХ должна l/2 раз охватывать
или при l=0 (разомкнутая
система устойчива) не охватывать точку
(-1; j0).
-
Точность систем автоматического управления в типовых режимах.
Качество работы любой системы определяется величиной ошибки – разность между требуемым и действительным значениями регулируемой величины. Критерий качества - используются для определения качественных показателей системы регулирования.
Критерии качества систем регулирования
-
Критерии точности
-
Критерии определения запаса устойчивости
-
Быстродействие системы регулирования
-
Комплексные критерии дающие оценку некоторых обобщенных свойств (могут учитывать предыдущие 3 критерия)
Для оценки точности системы регулирования используется величина ошибки в различных типовых режимах.
Неподвижное состояние. - Установившееся состояние при постоянных значениях задающего и возмущающего воздействий. Ошибка будет называться статической.
Движение с постоянной скоростью - Режим применяется в следящих системах и программного регулирования.
Движение с постоянным ускорением - Режим применяется в следящих системах и программного регулирования.
Движение по гармоническому (синусоидальному) закону.