

§ 5. Динамический принцип виртуальных перемещений
Пример 5.1. Два ползуна A и B массой m каждый шарнирно скреплены с двумя одинаковыми стержнями, концы которых связаны шарниром C (рис. 40). Ползуны могут скользить по горизонтальным направляющим без трения. К точке соединения стержней подвешен груз D массой M и отпущен без начальной скорости. Каково будет ускорение wD груза D в начальный момент движения, если стержень в этот момент образует угол с горизонтом и движется в вертикальной плоскости? Массой стержней пренебречь.
Решение.
Если
применять законы Ньютона к ползунам,
то приходится
рассматривать реакции стержней.
Динамический принцип виртуальных
перемещений позволяет обойтись без
этого. Нужно лишь приравнять
нулю сумму работ активных сил и сил
инерции на произвольных виртуальных
перемещениях.
Активными силами являются силы тяжести
m![]() иM
иM![]() .
Силы инерции
.
Силы инерции![]() ,
,![]() и
и![]() направлены навстречу ускорениям
направлены навстречу ускорениям![]() ,
,![]() и
и![]() соответствующих тел (рис. 40). Введем
произвольные виртуальные перемещения
соответствующих тел (рис. 40). Введем
произвольные виртуальные перемещения![]() ,
,![]() и
и![]() точек
приложения указанных сил (рис. 40). В
соответствии сдинамическим
принципом виртуальных перемещений
получим
уравнение
точек
приложения указанных сил (рис. 40). В
соответствии сдинамическим
принципом виртуальных перемещений
получим
уравнение
2
![]()
![]() +M
+M![]()
![]() +
+![]()
![]() = 0 ,
= 0 ,
или (ID – M g) y – 2 IA x = 0 , (5.1)
где
x
и y
– проекции
![]() и
и![]() на осиx
и y,
соответственно (рис. 40).
на осиx
и y,
соответственно (рис. 40).
Рис.
40

vA cos = vD sin . (5.2)
![]() и
и
![]() – скорости соответствующих точек.
Умножив (5.2) на промежуток времени t,
за который совершаются рассматриваемые
виртуальные перемещения, получим: rA
cos
= vA
t
cos
= vD
t
sin
= rD
sin
. Это и дает искомое соотношение между
величинами x
и y:
– скорости соответствующих точек.
Умножив (5.2) на промежуток времени t,
за который совершаются рассматриваемые
виртуальные перемещения, получим: rA
cos
= vA
t
cos
= vD
t
sin
= rD
sin
. Это и дает искомое соотношение между
величинами x
и y:
x cos = – y sin . (5.3)
Здесь учтено, что x = rA, а y = – rD в соответствии с выбранным направлением координатных осей (рис. 40).
Из (5.1) и (5.3) находим:
(M wD – M g) y + 2 m wA · tg · y = 0 . (5.4)
Дифференцируя (5.2), получим
![]() A
cos
– vA
sin
A
cos
– vA
sin
![]() =
=![]() D
sin
+ vD
cos
D
sin
+ vD
cos
![]() ,
,
что дает для рассматриваемого начального момента времени, когда vA = vD = 0, искомую связь wA и wD :
wA cos = wD sin . (5.5)
Подставляя (5.3) и (5.5) в (5.1), получим после сокращения на y 0
wD = M g / ( M + 2 m tg2 ) .
Задачи для самостоятельного решения
Рис. 41

Ответ
: w
= g
![]() ,
,
если m1 достаточно велико, чтобы было обеспечено w 0. Если m1 достаточно мало, то скольжение происходит в противоположном направлении, а выражение для модуля ускорения отличается от приведенного заменой 1 2 и . Если отличие m1 и m2 не достаточно велико для описанных ситуаций, то тела останутся в покое.
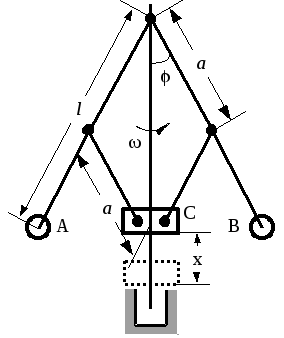
Задача 5.2. В регуляторе, показанном на рисунке 42, определить угол при установившемся вращении с угловой скоростью , если масса каждого шара равна m, масса муфты E равна M, отрезки OC = AC = EC = a. Массой стержней, размерами муфты и трением пренебречь.
Рис.
42

=
arccos
![]() ,
,
если
>
![]() ;
иначе
= 0.
;
иначе
= 0.
Задача 5.3. В системе, изображенной на рисунке 43, определить силу T натяжения троса CD и ускорения w1 и w2 грузов 1 и 2, массы которых равны, соответственно, m1 и m2. Свободные участки тросов считать вертикальными. Массой блоков и трением пренебречь.
Ответы
: w1
= g
![]() ,
,
w2
=
4 g
![]() , T =
, T =![]() .
.
Рис. 44
Рис. 43


Ответ :
= g (m2 r2 – m1 r1) / (m2 r22 – m1 r12) .
Задача 5.5. Тело массой m1 положили на горизонтальную плоскость. К нему посредством нити, перекинутой через неподвижный блок подвесили другое тело массой m2. Нить между телом и блоком расположена горизонтально. Коэффициент трения груза о плоскость равен . Найти ускорение w, с которым движутся тела, и силу T натяжения нити. Решить задачу двумя способами, один из которых используется в школе.
Ответы : w = g (m2 – m1) / (m1 + m2),
T = g m1 m2 (1 + ) / (m1 + m2).
Рис.
45

Ответы :
w = g m4 / (m1 + m2 + m3 + m4) ,
T = g m4 m1 / (m1 + m2 + m3 + m4) .
Задача
5.7. Нить,
один конец которой закреплен в точке
A,
охватывает подвижный блок O,
к которому подвешен груз массой m1,
и неподвижный блок O1
(рис.45). К другому концу нити привязан
груз массой m2.
С каким ускорением
![]() движется второй груз? Массой блоков и
нити, а также трением пренебречь. Решить
задачу двумя способами, один из которых
используется в школе.
движется второй груз? Массой блоков и
нити, а также трением пренебречь. Решить
задачу двумя способами, один из которых
используется в школе.
Ответ :
![]() =
2
=
2
![]() (2m2
– m1)
/ (4 m2
+ m1).
(2m2
– m1)
/ (4 m2
+ m1).
Рис. 46
Ответ
: x
= 2 a
![]() ,
,
если
>
![]() ,
иначе x
= 0.
,
иначе x
= 0.
Рис. 47

![]() груза массойm1,
если отношение плеч рычага OA
/ OB
= k.
Массами рычага и блоков, а также трением
пренебречь. Участки нитей AC
и BD
расположены вертикально.
груза массойm1,
если отношение плеч рычага OA
/ OB
= k.
Массами рычага и блоков, а также трением
пренебречь. Участки нитей AC
и BD
расположены вертикально.
Ответ :
![]() =
=
![]() k
(m1
k
– m2)
/ (m1
k
2 +
m2).
k
(m1
k
– m2)
/ (m1
k
2 +
m2).