

§ 2. Кинематика твердого тела
Пример
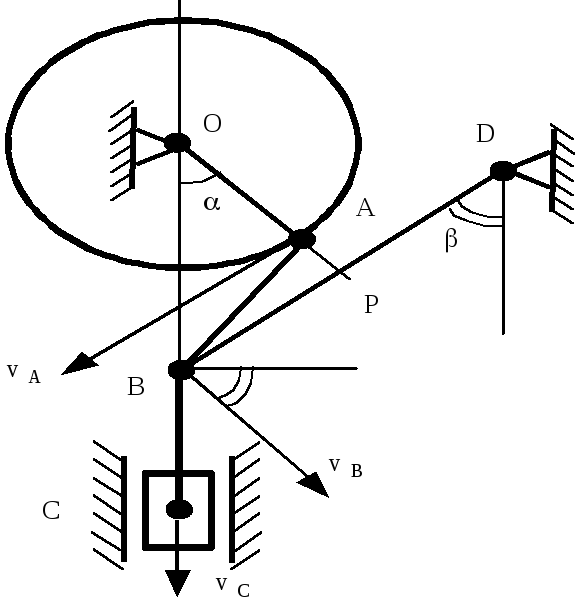
2.1.
Кривошип OA
механизма, показанного на рисунке
10, вращается с угловой скоростью 0.
Определить скорость vc
точки C,
а также угловую скорость BD
звена BD
в том положении механизма, в котором
звено BC
занимает вертикальное положение. Длины
звеньев и изображенные на рис. 10 углы
заданы: OA
= AB
= a;
BD
= a
![]() ;
= 300
;
= 600.
;
= 300
;
= 600.
Решение.
К рассматриваемому механизму можно применять известные соотношения, описывающие плоское движение абсолютно твердого тела.
Рис.
10
![]() нужно определить скорость
нужно определить скорость![]() точкиB,
которая зависит от скорости
точкиB,
которая зависит от скорости![]() точкиA
, принадлежащей кривошипу OA.
Движение последнего задано. Поэтому,
переходя последовательно от описания
движения звена OA
к анализу движения звеньев AB
и BC,
достигнем цели.
точкиA
, принадлежащей кривошипу OA.
Движение последнего задано. Поэтому,
переходя последовательно от описания
движения звена OA
к анализу движения звеньев AB
и BC,
достигнем цели.
По формуле Эйлера
vA = 0 a (2.1)
причем
вектор
![]() перпендикуляренOA.
Направление движения еще одной точки
звена AB
также известно: скорость
перпендикуляренOA.
Направление движения еще одной точки
звена AB
также известно: скорость
![]() перпендикулярнаBD.
Это позволяет найти мгновенную ось P
вращения звена AB
(рис. 10). Применяя формулу
Эйлера для вращения
звена AB
вокруг
мгновенной оси
P
с угловой скоростью AB,
получим
перпендикулярнаBD.
Это позволяет найти мгновенную ось P
вращения звена AB
(рис. 10). Применяя формулу
Эйлера для вращения
звена AB
вокруг
мгновенной оси
P
с угловой скоростью AB,
получим
vA = AB · AP . (2.2)
Нетрудно показать, что при заданной в задаче конфигурации механизма AP = a / 2 . C этим значением из (2.2) и (2.1) получим AB = 2 0. Скорость точки B по той же формуле Эйлера равна
vB
= AB
BP = 2 0·a![]() / 2 = 0
a
/ 2 = 0
a![]() .
.
Точка В принадлежит звену BD, угловую скорость которого также требуется найти в задаче. Применяя к этому звену формулу Эйлера, получим один из ответов:
BD
= vB
/ BD = 0
a![]() /(a
/(a![]() )
= 0
.
)
= 0
.
Осталось
связать скорости
![]() B
и
B
и
![]() .
Для этого можно воспользоватьсятеоремой
о равенстве проекций скоростей точек
абсолютно твердого тела на прямую, их
соединяющую:
.
Для этого можно воспользоватьсятеоремой
о равенстве проекций скоростей точек
абсолютно твердого тела на прямую, их
соединяющую:
vC = vB cos (900 – ) = 3 0 a / 2 .
Пример 2.2. Катушка радиусом R катится без скольжения по горизонтальной плоскости под действием груза массой M, привязанного к нити, намотанной на барабан катушки (рис. 11). Радиус барабана – r. Груз имеет в данный момент времени скорость v и ускорение w. Определить ускорения w0 , wB , wD и wC точек, отмеченных на рисунке 11.
Рис.
11

Катушка совершает плоскопараллельное движение, вращаясь вокруг мгновенной оси C (рис. 11). Если нить нерастяжима и не проскальзывает, то скорость vD и тангенциальное ускорение wD точки D катушки равны, соответственно, v и w.
Проще
всего определить ускорение
![]() точки O,
поскольку эта точка движется прямолинейно,
то есть ее скорость
точки O,
поскольку эта точка движется прямолинейно,
то есть ее скорость
![]()
![]() (рис. 11). Ускорения остальных точек
катушки могут быть выражены через
(рис. 11). Ускорения остальных точек
катушки могут быть выражены через![]() соотношением, аналогичным
теореме Шаля.
Для точки B
имеем:
соотношением, аналогичным
теореме Шаля.
Для точки B
имеем:
![]() =
=
![]() +
+
![]() , (2.3)
, (2.3)
где
ускорение
![]() точки В относительно точкиO
равно сумме нормального
точки В относительно точкиO
равно сумме нормального
![]() и тангенциального
и тангенциального![]() ускорений:
ускорений:
![]() =
=![]() +
+![]() .
(2.4)
.
(2.4)
Соответствующий формулам (2.3) и (2.4) векторный многоугольник изображен на рисунке 12. Величины wBn и wB можно выразить через угловую скорость и угловое ускорение барабана:
wBn = 2 R ; wB = R. (2.5)
Рис.
12

= v / (R – r). 2.6)
Та же формула, примененная к вращению точки O вокруг C, дает:
v0
=
R
w0
=![]() =
R = wB
. (2.7)
=
R = wB
. (2.7)
С другой стороны, v0 = v R / (R – r) . Следовательно,
w0
=![]() =
=
![]() =
=![]() w
. (2.8)
w
. (2.8)
С учетом (2.5) – (2.8) получим из рисунка 12:
wB2 = wBn2 + (wB + w0)2 = wBn2 + 4 w02
wB
=
![]() .
.
Рис.
13

wDn
= 2
r
=
![]() ,
(2.9)
,
(2.9)
wD
=
![]() r =
r =
![]() w
, (2.10)
w
, (2.10)
w0 – wD = w. (2.11)
Последнее соотношение следует из (2.8) и (2.10). С найденными значениями получим из рисунка 13:
wD2
= wDn2
+ (w0
– wD)2
wD
=
![]() .
.
Ускорение wC найдите самостоятельно. Должно получиться
wC = v2 R / (R – r)2 .
Пример 2.3. Определить ускорение wB поршня B и угловое ускорение AB шатуна AB в положении кривошипно-шатунного механизма, изображенного на рисунке 14. Длина кривошипа OA равна r, шатуна AB – l. В указанном положении угловая скорость вращения кривошипа OA равна , а его угловое ускорение – .
Решение.
Искомое
ускорение
![]() следует связать с ускорением
следует связать с ускорением![]() точки А, поскольку она принадлежит
кривошипу ОА, движение которого известно:
точки А, поскольку она принадлежит
кривошипу ОА, движение которого известно:
![]() =
=
![]() +
+![]()
Рис. 14

![]() =
=
![]() +
+![]() +
+![]() +
+![]() .
(2.12)
.
(2.12)
Направления
ускорений показаны на рисунке 15. Для
определенности выбрано
=
![]() > 0. Этому соответствует указанное на
рисунке 15 направление
> 0. Этому соответствует указанное на
рисунке 15 направление![]() .
Тангенциальное ускорение
.
Тангенциальное ускорение![]() , возможно, имеет и противоположное
направление. Куда именно направлено
, возможно, имеет и противоположное
направление. Куда именно направлено![]() ,
будет выяснено в процессе решения.
,
будет выяснено в процессе решения.
Найдем модули ускорений:
wAn = 2 r ; wA = r; (2.13)
wBn = AB2 l ; (2.14)
Рис.15

Для нахождения AB воспользуемся теоремой Шаля:
![]() =
=
![]() +
+
![]() .
(2.16)
.
(2.16)
Так
как
![]()
![]() ,
а
,
а
![]() имеет иное направление, то равенство
(2.16) возможно только при
имеет иное направление, то равенство
(2.16) возможно только при
![]() = 0, то есть шатун AB
в рассматриваемый момент движется
поступательно. Следовательно, AB
= 0 и, в соответствии с (2.14), wBn
= 0.
= 0, то есть шатун AB
в рассматриваемый момент движется
поступательно. Следовательно, AB
= 0 и, в соответствии с (2.14), wBn
= 0.
Направление
искомого вектора
![]() задается стенками цилиндра с поршнем,
поэтому целесообразно записать уравнение
(2.12) в проекциях на осиx
и y
(рис. 15). При этом учтем (2.13) – (2.15):
задается стенками цилиндра с поршнем,
поэтому целесообразно записать уравнение
(2.12) в проекциях на осиx
и y
(рис. 15). При этом учтем (2.13) – (2.15):
wBx = 2 r – (AB l cos ) = 0 ; (2.17)
wBy = r – (AB l sin ) . (2.18)
Верхний
знак в этих формулах соответствует
показанному на рисунке 15 направлению
![]() ,
нижний – противоположному. Чтобы
обеспечить равенство (2.17), следует
оставить лишь верхний знак, то есть
ускорение
,
нижний – противоположному. Чтобы
обеспечить равенство (2.17), следует
оставить лишь верхний знак, то есть
ускорение![]() направлено именно так, как указано на
рисунке 15.
направлено именно так, как указано на
рисунке 15.
Подставляя
в (2.17) и (2.18) cos
=
![]() и sin
=
и sin
=
![]() ,
получим ответы:
,
получим ответы:
AB
=
![]() ; wBy
= r (
–
; wBy
= r (
–
![]() )
.
)
.
Если
>
![]() , то wBy
= wB
> 0, то есть
, то wBy
= wB
> 0, то есть
![]() направлено к
точкеO.
При меньших ,
в том числе и при
< 0,
направлено к
точкеO.
При меньших ,
в том числе и при
< 0,
![]() направлено в противоположную сторону.
направлено в противоположную сторону.
Задачи для самостоятельного решения
Рис. 16

![]() точки D
шатуна NK
в положении механизма, изображенном
на рисунке 16, когда коромысло O1N
перпендикулярно к шатуну NK
и параллельно направляющим ползуна B,
а скорость ползуна B
равна v.
Отрезок DK
= NK
/ 3.
точки D
шатуна NK
в положении механизма, изображенном
на рисунке 16, когда коромысло O1N
перпендикулярно к шатуну NK
и параллельно направляющим ползуна B,
а скорость ползуна B
равна v.
Отрезок DK
= NK
/ 3.
Ответ : vD = 2 v / 3.
Задача 2.2. Центр колеса, которое катится по наклонной плоскости без скольжения, движется по закону s = 4 t2 + 16 (t – в секундах, s – в сантиметрах). Определить ускорение w точки касания колеса с плоскостью в момент времени t = 2 с, если радиус колеса R = 16 см.
Ответ :
w
=
![]() =
16 см/с2.
=
16 см/с2.
Задача 2.3. Кривошип OA, вращаясь с постоянной скоростью , приводит в движение колесо радиуса r, катящееся без проскальзывания по неподвижному колесу радиуса R (рис. 17). Найти скорость vB и ускорение wB точки B.
Ответ :
Рис. 17

wB = 2 (R + r) (R + 2r) / r .
Задача 2.4. Колесо радиусом r катится без скольжения по неподвижному рельсу. Зная, что ускорение точки касания в данный момент равно w, определить в этот момент скорость v диаметрально противоположной точки.
Ответ
: v
= 2
![]() .
.
Рис.
18

Ответы :
а) wA = wB = (v1 – v2)2 / (4 r) ;
б) wA = wB = (v1 + v2)2 / (4 r) .
Рис. 19

Ответы :
wB
=
 ;
;
wB
=
 .
.
Рис.
20

Ответ :
v = n (R – r) = 5,2 см/с.
Задача 2.8. В шарнирном четырехзвеннике ABCD (рис. 21) ведущий кривошип AB вращается с постоянной угловой скоростью 0 = 6 с–1. Определить угловые скорости CD и BC кривошипа CD и стержня BC в тот момент, когда AB и BC лежат на одной прямой. BC / AB = 3.
Ответы : CD = 0;
BC = 0 AB / BC = 2 с–1.
Рис.
21

Ответы :
= v / r ,
Рис. 22

![]() .
.
Задача 2.10. В кривошипно-шатунном механизме, изображенном на рисунке 22, длина кривошипа OA равна r. Определить ускорение w точки A в тот момент, когда угол между OA и AB прямой, если в этот момент угол = 300, а скорость ползуна B имеет максимальное значение v0.
Ответ
: w
=
![]() =
=
![]() .
.
Задача 2.11. Изображенный на рисунке 18 суммирующий механизм состоит из зубчатого колеса радиусом R и двух параллельных зубчатых реек, движущихся в одну сторону со скоростями v1, v2 и ускорениями w1, w2. Определить ускорения wA и wB точек A и B зубчатого колеса, находящегося в зацеплении с рейками.
Ответы
: wA
=
 , wB
=
, wB
=
 .
.
Задача 2.12*). По внутренней цилиндрической поверхности, радиус которой равен R, катится диск радиусом 2 R / 3. Определить радиус кривизны rK траектории той точки диска, которая наиболее удаленна от точки касания.
Ответ : rK = 8 R / 3.