

§ 11. Колебания
Пример
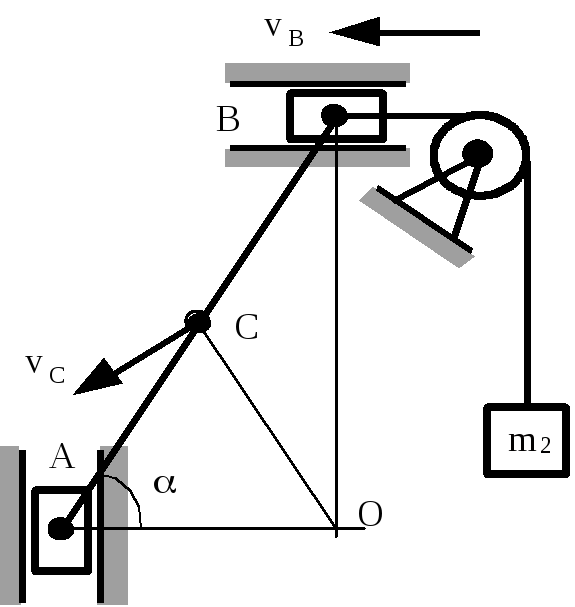
11.1. Однородный
стержень AB
массой m
и длиной 2l
может скользить своими концами A
и B
по гладким взаимно перпендикулярным
направляющим (рис. 76). В точке B
к стержню прикреплена нить, перекинутая
через идеальный блок, к другому концу
которого присоединен груз массой m2
= m1![]() .
Определить угол 0
, при котором
система находится в равновесии, и период
T
малых колебаний около этого положения.
Массой ползунов и блока пренебречь.
.
Определить угол 0
, при котором
система находится в равновесии, и период
T
малых колебаний около этого положения.
Массой ползунов и блока пренебречь.
Решение.
Рис.
76
L
= T – U
=
mq
![]() 2
/ 2 – kq
q2
/ 2 , (11.1)
2
/ 2 – kq
q2
/ 2 , (11.1)
где T – кинетическая энергия, U – потенциальная функция (потенциальная энергия системы «груз – Земля», а q – обобщенная координата. Незначительное отклонение от положения устойчивого равновесия приводит к гармоническим колебаниям с периодом
T
= 2
![]() . (11.2)
. (11.2)
Таким образом, анализ возможных колебаний сводится к определению положения устойчивого равновесия и нахождению для него величин
mq
=
![]() =
=
![]() и kq
= –
и kq
= –
![]() =
=
![]() . (11.3)
. (11.3)
В данной задаче
T
= m1
vC2
/ 2 + J
![]() 2
/ 2 + m2
vB2
/ 2 , (11.4)
2
/ 2 + m2
vB2
/ 2 , (11.4)
где vC – скорость центра масс стержня, vB – скорость груза m2 , равная скорости точки B, J = m1 l2 / 3 – момент инерции стержня относительно центра масс.
Потенциальная энергия равна работе сил тяжести при переходе системы в нулевое состояние. Приняв состояние с = / 2 за нулевое, получим:
U = – m2 g 2 l cos + m1 g (l – l sin ) . (11.5)
Положение
равновесия определяется условием
![]() = 0 . Подставляя в это условие (11.5), найдем
равновесное значение
= 0
:
= 0 . Подставляя в это условие (11.5), найдем
равновесное значение
= 0
:
2 m2 g l sin 0 – m1 g l cos 0 = 0.
tg
0
=
m1
/ (2 m2)
= 1 / ( 2
![]() )
=
)
=![]() / 4 .(11.6)
/ 4 .(11.6)
В качестве обобщенных координат возьмем , то есть q . Тогда из (11.5), (11.3) и (11.6) получим, используя также соотношение
1 + tg2 0 = 1 / cos2 0 :
kq
= 2 m2
g l
cos 0
+ m1
g l
sin 0
= m2
g l
3 /
![]() = 3 m1
g l
. (11.7)
= 3 m1
g l
. (11.7)
Поскольку величина kq > 0, то равновесие является устойчивым (функция U() имеет минимум при = 0).
Входящие в выражение (11.4) скорости vC и vB можно выразить по формуле Эйлера, принимая во внимание, что точка O (рис. 76) является мгновенным центром вращения стержня AB:
vC
=
![]() ·OC
=
·OC
=
![]() l;
vB
=
l;
vB
=
![]() ·
OB =
·
OB =
![]() 2l
sin
.
2l
sin
.
Подставляя эти значения в (11.4), получим
T
= 2 m1
l2
![]() 2
(1 + 3
2
(1 + 3
![]() sin2
)
/ 3 .
sin2
)
/ 3 .
Отсюда с учетом (11.6) найдем:
mq
=
![]() =
=![]() m1
l2
. (11.8)
m1
l2
. (11.8)
Теперь можно подставить (11.7) и (11.8) в (11.2) и получить ответ:
T
= 2
![]() = 5,08
= 5,08
![]() .
.
Пример 11.2. Два невесомых стержня длиной l с укрепленными на нижних концах грузами массой m могут свободно вращаться в вертикальной плоскости вокруг точек A и B (рис. 77). Стержни соединены пружиной жесткостью k на расстоянии b от верхних концов. Когда стержни расположены вертикально, нить не деформирована. Найти собственные частоты 1 и 2 и нормальные координаты Q1 и Q2 рассматриваемого осциллятора.
Рис. 77

Заданная в задаче система действительно представляет собой двумерный осциллятор, поскольку она обладает двумя степенями свободы и при вертикальном положении стержней находится в устойчивом равновесии.
В качестве обобщенных координат естественно взять углы 1 и 2 отклонения стержней (рис. 77). Через эти координаты нужно выразить функцию Лагранжа L = T –U.
Кинетическая энергия T равна:
T
= m l2
(![]() 12
+
12
+
![]() 22)
/ 2 . (11.9)
22)
/ 2 . (11.9)
Потенциальная функция U, или потенциальная энергия системы «стержни с грузами – пружина – Земля» равна работе сил тяжести и упругости при переходе системы в нулевое состояние. Пусть в нулевом состоянии
1 = 2 = 0 .
Тогда U = m g (l – l cos 1) + m g (l – l cos 2) + k ( b sin 2 – b sin 1)2 / 2 .
Если ограничиться малыми колебаниями, то последнее выражение приводится к виду:
U (m g l + k b2) (12 + 22) / 2 – k b2 1 2 . (11.10)
Рассмотрим вначале стандартный метод анализа нормальных колебаний.
Находим
кинематические
m
i
j
и динамические
k
i
j
параметры системы по формулам m
i
j
=
![]() ; k
i
j
=
; k
i
j
=
![]() , где i,
j
= 2, 2 . Дифференцирование (11.9) и (11.10) дает:
, где i,
j
= 2, 2 . Дифференцирование (11.9) и (11.10) дает:
m12 = m21 = 0 ; m11 = m22 = m l2 ; (11.11)
k11 = k22 = m g l + k b2 ; k12 = k21 = – k b2 . (11.12)
Для нахождения собственных частот решаем вековое уравнение
(11.13)
|
m |
– k b2 |
|
|
|
|
= 0 |
|
– k b2 |
m g l + k b2 – m l2 2 |
|

 gl
+ k b2
– m l2
2
gl
+ k b2
– m l2
2Решая (11.13), находим собственные частоты, то есть частоты нормальных колебаний:
1
=
![]() и2
=
и2
=
![]() . (11.14)
. (11.14)
Соответствующие этим частотам нормальные координаты Q1 и Q2 должны удовлетворять уравнениям
i
=
![]() A
i
Q
, (11.15)
A
i
Q
, (11.15)
где = 1, 2, а A i находится из системы
![]() (k
i
j
– m i
j
2)
A j
= 0 . (11.16)
(k
i
j
– m i
j
2)
A j
= 0 . (11.16)
Подставляя в (11.16) = 1, а также (11.11) и (11.12), получим:
( m
gl
+ k b2
– m l2
g / l
) A11
– k b2
A21
= 0 ,
m
gl
+ k b2
– m l2
g / l
) A11
– k b2
A21
= 0 ,
–k b2 A11 + (m g l + k b2 – m l2 g / l ) A21 = 0.
Отсюда следует, что A11 = A21 .
Аналогично, подставляя в (11.16) = 2, найдем, что A12 = – A22.
С найденными значениями уравнения (11.15), то есть
 1
= A11
Q1
+
A12
Q2
,
1
= A11
Q1
+
A12
Q2
,
2 = A21 Q1 + A22 Q2 ,
дают:
Q1 = (1 + 2) / (2 A11) , (11.17)
Q2 = (1 – 2) / (2 A22) . (11.18)
Если Q2 = 0, то есть 1 = 2 , то в системе реализуются нормальные колебания с частотой 1 (11.14). В этом случае пружина не деформирована, и поэтому результат такой же , как для математического маятника.
Второе нормальное колебание (при Q1 = 0, или 1 = – 2) происходит с большей частотой 2 (11.14), так как процесс убыстряется благодаря силе упругости пружины.
Рассмотрим второй способ анализа нормальных колебаний – метод приведения функции Лагранжа к каноническому виду, то есть к виду:
L
=
![]() (m
(m
![]() 2
– k
Q
2)
/ 2 . (11.19)
2
– k
Q
2)
/ 2 . (11.19)
Сопоставляя формулы (11.9) и (11.10) с (11.19), видим, что приведение функции Лагранжа к каноническому виду сводится к такому подбору линейных комбинаций типа (11.15), при котором формула (11.10) избавилась бы от смешанных производных обобщенных координат, то есть чтобы произведение 1·2 превратилось в выражение B1 Q12 + B2 Q22 , где B1 и B2 – некоторые постоянные.
Формула разности квадратов наводит на мысль попробовать подстановку
1 = Q1 + Q2 и 2 = Q1 – Q2 . (11.20)
Подставляя (11.20) в (11.9) и (11.10), получим
L
= m l2
(![]() 12
+
12
+
![]() 22)
– m g l
(Q12
+ Q22)
– 2 k b2
Q22
.
22)
– m g l
(Q12
+ Q22)
– 2 k b2
Q22
.
Лагранжиан в координатах Q1 и Q2 действительно имеет канонический вид (11.19) с параметрами:
m1 = m2 = 2 m l2 ; k1 = 2 m g l , k2 = 2 m g l + 4 k b2 . (11.21)
Соответствующие
нормальным координатам Q1
и Q2
частоты определяются формулой
=
![]() .
При подстановке (11.21) она дает соотношения
(11.14).
.
При подстановке (11.21) она дает соотношения
(11.14).
Формулы (11.20) приводят к выражениям (11.17) и (11.18), полученным ранее другим способом , если положить произвольные постоянные A11 = A22 = 1.
Задачи для самостоятельного решения
Задача 11.1. U- образная трубка с одинаковой площадью поперечного сечения по всей длине открыта с двух концов. Трубка содержит две несжимаемые и не смешиваемые жидкости с плотностями 1 и 2. Определить период собственных колебаний системы около положения равновесия, если длина части трубки, занимаемой одной жидкостью, равна l1, а части, занимаемой другой, – l2.
Ответ
:
= 2
![]() .
.
Задача 11.2. Однородный сплошной цилиндр радиусом r может катиться без скольжения по внутренней поверхности неподвижной трубы, радиус которой равен R. Найти период малых колебаний оси цилиндра.
Ответ
:
= 2
![]() .
.
Задача 11.3. К середине упругой невесомой горизонтально расположенной балки с коэффициентом k присоединен математический маятник массой m и длиной l. Определить собственные частоты 1 и 2 и нормальные координаты Q1 и Q2 системы.
Ответы
: 1
=
![]() ,Q1
=
– угол отклонения маятника от вертикали;
2
=
,Q1
=
– угол отклонения маятника от вертикали;
2
=
![]() ,Q2
= s
– смещение точки подвеса от положения
равновесия.
,Q2
= s
– смещение точки подвеса от положения
равновесия.
Рис.
78

Ответ
:
= (4
/ 3)![]() .
.
Рис. 79

Ответ
:
1 =
![]() ;
2 =
;
2 =
![]() .
.
Задача 11.6 К*). К однородному цилиндру с моментом инерции J = m r2 и радиусом r, имеющему неподвижную горизонтальную ось вращения, прикреплены с двух сторон вертикальные упругие нити с коэффициентами жесткости k1 и k2 (рис. 79). Конец первой нити закреплен неподвижно в точке A, а на конце второй нити висит груз массой m. Найти собственные частоты 1 и 2 системы в символьном виде при k1 = 2 k2; = 2. С помощью файла «Осциллятор2» вычислите значения собственных частот при k1 = 10, k2 = 30 и = 2, а также = 100.
Ответы
: 1
=
![]() ; 2
=
; 2
=
![]() ;
;
1 = 5,602, 2 = 21,632 при = 2;
Рис. 80

Задача 11.7 Ш. Брусок массой m скреплен пружиной жесткостью k с доской массой M (рис. 80). Доска лежит на гладкой горизонтальной плоскости. Пружину сжимают на величину x0 и отпускают. Найти зависимость деформации x пружины от времени t.
Ответ:
x
= x0
cos
(
t)
, где
=
![]() .
.
Рис. 81

Ответ:
x
= 2 l
cos
(
t)
, где
=
![]() .
.
Рис. 82

Ответ:
= 2
![]() .
.
Задача 11.10. На концах горизонтально расположенного тонкого непроводящего стержня длиной l расположены две бусинки, несущие на себе электрический заряд q1 каждая. Третья такая же бусинка с зарядом q свободно надета на стержень и помещена посредине. Смещение бусинки из средней точки приводит к ее колебаниям . Найти период этих колебаний, считая их малыми.
Рис.
83

![]() .
.
Задача 11.11. Шар массой m, укрепленный на верхнем конце невесомого стержня длины l, зажат между двумя горизонтальными пружинами жесткостью k с закрепленными концами (рис. 83). Стержень может свободно поворачиваться вокруг неподвижной нижней точки. Считая пружины в положении равновесия не напряженными, найти период колебаний системы.
Ответ:
= 2
/
![]() .
.
Рис.84

Ответ:
= 2
![]() .
.
Задача 11.13.К. Груз массой M = 0,5 кг прикреплен к вертикально расположенной пружине жесткостью С = 10 Н/м. К грузу снизу подвешена аналогичная система с M1 = 2 M и C1 = 2 C. Проанализируйте колебания рассматриваемой системы с помощью файлов «Изучение МО» и «Функция Лагранжа». Запишите периоды T1 и T2 нормальных колебаний и функцию Лагранжа L в каноническом виде.
Ответы: T1 = 0,727 c, T2 = 2,714 с;
L = 0,429 vq12 – 32,055 q12 + 0,634 vq22 – 3,397 q22.