

1.5.2.Решение неопределённых слау.
Определение 1.5.3.
Система называется определенной, если она имеет только одно решение и неопределенной, если более одного.
Если
в системе (1.4.1) m n
и при этом rangA=rang
n
и при этом rangA=rang ,
то система совместна, но не определена.
,
то система совместна, но не определена.
Пример

Решение
rangA=
rang =
=

rangA=rang ,
m=2, n=3, m
,
m=2, n=3, m n
n

Ответ: y = 7-3x, z = 18 – 7x. (Система не определена).
1.5.3. Определение несовместных слау.
Определение 1.5.4.
Если система имеет хотя бы одно решение, то она называется совместной. Если система не имеет ни одного решения, то она называется несовместной.
Если
для системы (1.4.1) rangA rang
rang , то система не совместна и ее решение
не имеет смысла.
, то система не совместна и ее решение
не имеет смысла.
Пример 1.
Определить совместность системы линейных уравнений:
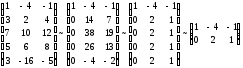
A
=

~
 .
. rangA
= 2.
rangA
= 2.
 =
=
 rang
rang = 3.
= 3.
Ответ: система несовместна.
Пример 2.
Определить совместность системы линейных уравнений.

Решение.
А
=
 ;
; = 2 + 12 = 14
0; rangA
= 2;
= 2 + 12 = 14
0; rangA
= 2;
 =
=
 rang
rang =
2.
=
2.
Ответ: система совместна, x1 = 1; x2 =1/2.
Лекция 6
1.6. Векторная алгебра
1.6.1. Вектор. Линейные операции с векторами. Базис. Декартова система
координат (ДСК).
1.6.2. Скалярное, векторное и смешанное произведение векторов.
1.6.3. Преобразование координат. Полярная система координат (ПСК).
1.4.1. Вектор. Линейные операции с векторами. Базис. Декартова система координат (дск).
1) Вектор.
Определение 1.6.1.
Математическим
или геометрическим вектором называется
направленный отрезок. Обозначается: ,
,
В
А
Свойство:
Математический вектор является свободным вектором, т.е. его можно переносить как угодно в пространстве параллельно самому себе.
В отличие от математического вектора физический вектор имеет точку приложения и его нельзя переносить.
Определение 1.6.2.
Длина
вектора
 называется его модулем, т.е.
называется его модулем, т.е. .
.
2) Линейные операции с векторами.
Определение 1.6.3.
Сложение и умножение вектора на число называется линейными операциями над векторами.
Определение 1.6.4.
Пусть
есть направленный отрезок
 к его концу приложен вектор
к его концу приложен вектор ,
тогда вектор
,
тогда вектор будет являться их суммой.
будет являться их суммой.
В
А С
Определение 1.6.5.
Произведение
вектора
 на числоλ
называется вектор λ
на числоλ
называется вектор λ
 ,
такой что длина
,
такой что длина ,
причём
,
причём иλ
иλ
 будут сонаправленны, еслиλ>0
и противоположно направлены, если λ<0.
будут сонаправленны, еслиλ>0
и противоположно направлены, если λ<0.
3) Базис
Определение 1.6.6.
Всякий
вектор
 отличный от нуля является базисом в
одномерном пространстве
отличный от нуля является базисом в
одномерном пространстве
![]()
Определение 1.6.7.
Упорядоченная
пара не коллинеарных векторов
 и
и называется базисом в двумерном
пространстве.
называется базисом в двумерном
пространстве.
Определение 1.6.8.
Упорядоченная
тройка не компланарных векторов (т.е.
не лежащих в одной плоскости)
 ,
, и
и может являться базисом трехмерного
пространства, и тогда всякий геометрический
вектор можно представить единственным
образом в виде
может являться базисом трехмерного
пространства, и тогда всякий геометрический
вектор можно представить единственным
образом в виде
 (1.6.1)
(1.6.1)
где x1, x2, x3 - координаты вектора.
4) Декартова система координат (ДСК).
Определение 1.6.9.
Базис
( ,
, ,
, )
называется ортогональным, если векторы
)
называется ортогональным, если векторы ,
, ,
, попарно перпендикулярны, и нормированным,
если они имеют единичную длину.
Ортогональный и нормированный базис
называется ортонормированным. Его
базисные вектора обозначаются:
попарно перпендикулярны, и нормированным,
если они имеют единичную длину.
Ортогональный и нормированный базис
называется ортонормированным. Его
базисные вектора обозначаются: =i,
=i,
 =j,
=j,
 =k
– и называются единичными ортами.
Система координат, имеющая ортонормированный
базис, называется декартовой системой
координат (ДСК).
=k
– и называются единичными ортами.
Система координат, имеющая ортонормированный
базис, называется декартовой системой
координат (ДСК).
ДСК на плоскости. ДСК в пространстве.


i
Определение 1.6.10.
Проекция
вектора
 на вектор
на вектор называется число
называется число ,
где
,
где ,
причем
,
причем

Замечание:
координаты
 для
для в прямоугольной системе координат
совпадают с проекциями вектора на орты
и длинна вектора равна:
в прямоугольной системе координат
совпадают с проекциями вектора на орты
и длинна вектора равна:
 (1.6.2)
(1.6.2)
Определение 1.6.11.
Направление вектора определяется его направляющими косинусами
 (1.6.3)
(1.6.3)