

9 УравнениЯ динамики объектов регулирования. Общий подход
Составление или выбор уравнений динамики количественно описывающих динамические свойства объектов представляет собой 1-ый этап задачи анализа САУ.

В уравнении динамики ОР отражают зависимость изменения во времени регулируемой величины от изменения во времени воздействия на объект, т.е. нагрузки и регулирующего воздействия.
Уравнение динамики объекта (матем. модель, матем. описание) обычно собой представляет диф. уравнение или систему диф. уравнений.
Порядок диф. уравнений или число системы определяется количеством аккумуляторов объекта.
Вид уравнений и значение их коэффициента определяют свойства ОР.
Уравнение динамики ОР получают аналитическим путем на основе матем. описания раб. процессов в объекте, или экспериментальным путем, проводя испытания реальных агрегатов и механизмов.
Общий подход к составлению уравнений динамики ОР:
Изучение агрегата или механизма, определение его особенностей как ОР и составление динам. структуры.
Составление динам. структуры заключается в следующем:
определение величин, характеризующих состояние ОР, в том числе регулируемой величины.
Определение регулирующих и возмущающих воздействий.
Изображение динам. схемы объекта
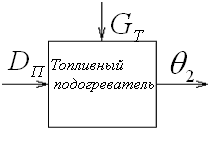
На основе данной схемы делается заключение, что уравнение динамики подогревателя топлива должно отражать нестац. зависимость температуры топлива Ө2 от регул. воздействия Dп и нагрузки расхода топлива GТ
Выделение аккумуляторов объекта и характера взаимодействия между ними по потокам вещества и энергии.
На основании полученной динам. структуры объекта формулируется конкретная задача получения его уравнений динамики
Выбор исходных уравнений для описания процессов, протекающих в объекте. Для судовых объектов этими уравнениями служат известные законы физики, закон сохранения энергии, закон сохранения вещества; законы состояния рабочей среды.
Выражение всех исходных уравнений через регулируемую величину и воздействия
Поскольку для анализа САР применяются методы теории линейных систем, то получается, как правило, нелинейная модель, заменяют приближенной линейной моделью
10 Уравнение динамики турбогенератора
Рассмотренный выше подход получения уравнения динамики ОР применим для получения, в качестве примера как объекта регулирования частоты вращения

ТГ считаем аккумулятором кинетической энергии вращающихся частей, т.е. он рассматривается как одноемкостный объект.
Расстояние ТГ определяется следующими вычислениями:
w - угловая скорость вращения ротора (регулируемая величина);
Dп - расход пара на турбину (регулируемая величина);
Nэ - электрическая мощность потребителей (нагрузка объекта).
Динамическая схема ТГ как ОР.

В соответствии с типом аккумулятора в качестве исходного уравнения динамики ТГ применяется известное из физики и механики уравнение моментов.
![]() (1)
(1)
- момент инерции всех вращающихся частей, приведенных к оси ротора турбины.
М в - вращающий момент турбины
М с - момент сопротивления ЭГ
моменты можно вычислить по следующим формулам:
![]() (2)
(2)
![]() (3)
(3)
индексом «н» обозначены значения величин на номинальном режиме.
Система уравнений (1 – 3) представляет собой нелинейную математическую модель ТГ.
Ее можно использовать для моделирования ОАР частоты вращения ТГ на компьютерах.
Для использования инженерных методов ТАУ получим линейное уравнение динамики ТГ.
Полагаем начальное состояние ТГ равновесным
![]() (4)
(4)
Уравнение (1) на равновесном режиме имеет следующий вид.
![]() (5)
(5)
Индексом «0» здесь и далее обозначены значения величин на начальном равновесном режиме.
Введем
отклонение переменных от их значений
на начальном равномерном режиме.
x – любая величина ТГ
![]()
![]()
![]()
![]() (6)
(6)
![]()
![]() (7)
(7)
(6),(7)
→ (1) ![]()
![]() (8)
(8)
(8) – уравнение отклонения ТГ в переменных
Зависимости (2) и (3) представим в общем виде:
![]()
![]() (9)
(9)
Приближенно представим отклонение моментов ----- как дифференциалы функций (9)

![]() (10)
(10)
(10) – (8)
![]() (11)
(11)
индекс «0» у частных производных означает, что значения вычисляются на начальном равновесном режиме.
![]() (12)
(12)
Уравнение (12) является линейным дифференциальным уравнением 1-го порядка с постоянными коэффициентами.
Оно является приближенным, т. к. в нем использованы линейные формулы для отклонения моментов.
Весь процесс получения линейного дифференцированного уравнения динамики называется линеаризацией
Уравнение (12) описывает отклонение ТГ от начального равновесного режима.
Чем меньше отклонение времени от него, тем уравнение точнее.
Таким образом, линеаризацией представляет замену нелинейных уравнений и зависимостей линейными.
Уравнение (12) является размерным, т.к. все его величины имеют физические размерности.
В автоматике, как правило, используют уравнения динамики элементов ОАР в относительных безразмерных переменных.
В этом случае уравнения многих объектов имеют несколько одинаковый вид, но и близкие значения коэффициентов уравнений, это означает, что разные судовые агрегаты и механизмы могут иметь близкие динамические свойства, что позволяет при их автоматизации использовать одни и те же методы.
Введем относительные переменные:
![]() -
относительное изменение угловой
скорости;
-
относительное изменение угловой
скорости;
![]() -
относительное изменение расхода пара;
-
относительное изменение расхода пара;
![]() -
относительное изменение нагрузки.
-
относительное изменение нагрузки.
![]()
![]()
Разделим все члены уравнения на величину
![]() -
уравнение динамики турбогенератора в
относительных переменных, конечная
цель вывода.
-
уравнение динамики турбогенератора в
относительных переменных, конечная
цель вывода.
![]() -
время разгона ТГ;
-
время разгона ТГ;
![]() количественно
отражает аккумулирующую способность
объекта. Чем больше
количественно
отражает аккумулирующую способность
объекта. Чем больше
![]() ,
тем медленнее изменяется размер величины.
,
тем медленнее изменяется размер величины.
![]() -
коэффициент самовыравнивания.
-
коэффициент самовыравнивания.
Z – описывает устойчивость объекта.
![]() -
коэффициент воздействия по регулирующему
воздействию.
-
коэффициент воздействия по регулирующему
воздействию.
Чем больше хр., тем больше изменяется размер величина при одном и том же изменении воздействия.
![]() -
коэффициент воздействия нагрузки.
-
коэффициент воздействия нагрузки.
Расчет коэффициентов уравнения динамики объекта регулирования.
Для практического использования уравнения динамики ОР необходимо рассчитать значения коэффициента уравнения.
Эти коэффициенты рассчитываются через частные производные, входящие в их выражения.
1-ым этапом является расчет начального режима, т.е. расчет начальных постоянных значений величины.
Для их расчета целесообразно использовать методы поверочных расчетов судовых агрегатов и механизмов или использовать графические зависимости, предоставляющих результаты поверочных расчетов.
Если исходные нелинейные зависимости заданы аналитически, то вычисление частных производных производится по обычным формулам дифференцирования
![]()
![]()

![]()
Если зависимости для ОР заданы графически, то вычисление частных производных производится графическим дифференцированием.
Рассмотрим
вычисление.![]()
![]()

Порядок расчета: на график наносится точка начального равновесного режима ; график интегрированием строится линия, соответствующая начальному режиму ; проводится касательная к этой линии в (·)А0 ; на этой касательной как на гипотенузе строится произвольный прямоугольный треугольник, с катетами параллельно осям координат; определяются длины катетов
Тогда
![]()
Знак « - » учитывает, что зависимость является убывающей.
Для нахождения второй частной производной графики перестраиваются.
![]()
