

29 Дифференцирующее звено 1-го порядка (форсирующее)
![]() (1)
(1)
операторное уравнение звена:
![]() (2)
(2)
![]() (
3)
(
3)
Разгонную характеристику определить не имеет смысла.
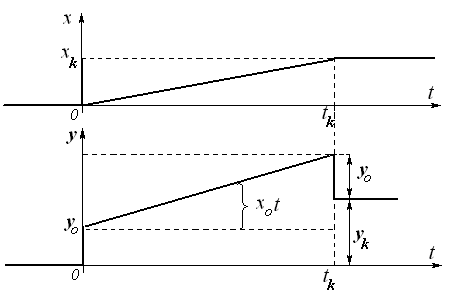
Р ассмотрим
поведение звена при подаче на его вход
линейно изменяющегося сигнала.
ассмотрим
поведение звена при подаче на его вход
линейно изменяющегося сигнала.
![]() ,
,
![]()
![]()
![]()
В
момент времени
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
ЛАЧХ: ![]()
![]()
![]()
![]()
![]()

ЛФЧХ: ![]()
![]()
![]()
![]()
![]()
![]()
30 Звено запаздывания
Это звено описывается уравнением:
![]()
![]() (1)
(1)
![]()
![]()

Частотная передаточная функция звена.
![]()
![]()
АЧХ: ![]()
ФЧХ: ![]()
![]()
![]()

![]() -
Формула Эйлера
-
Формула Эйлера
ВЧХ: ![]()
МЧХ: ![]()
ЛАЧХ:
![]()
31 Уравнения и передаточные функции сар
Отражают все динамические свойства системы регулирования, а через них качество её работы.

Уравнения САР отражают зависимость изменения во времени регулирования величины Х от изменения во времени нагрузки объекта F и задающего воздействия Xз.
Исходными данными для получения уравнения САР являются уравнения её элементов.
По этим уравнениям:
Находятся передаточные функции элементов.
Строятся структурная схема САР.
Структурная схема с помощью правил преобразования структурных схем преобразуется к следующему виду.

Передаточные функции: Wор – объект регулирования по регулирующему воздействию.
Wон(S) – ОР по нагрузке.
Wрег(S) – регулятора
Wд(S) – датчика
Уравнения отдельных частей САР
ОР: ![]() (1)
(1)
Д: ![]() (2)
(2)
ЭС: ![]() (3)
(3)
Рег.: ![]() (4)
(4)
Эту
систему уравнений необходимо решить
относительно изображения регулируемой
величины![]()
(4)
(1)
=>
![]() (5)
(5)
(3)
(5)
=> ![]() (6)
(6)
(2)
(6)
=> ![]()
![]() (7)
(7)
Обозначим:
![]() (8)
– передаточная функция разомкнутой
САР. Она используется для оценки
устойчивости системы.
(8)
– передаточная функция разомкнутой
САР. Она используется для оценки
устойчивости системы.
(8)
(7)
=>
![]()
![]() -
уравнение замкнутой САР в передаточных
функциях.
-
уравнение замкнутой САР в передаточных
функциях.
![]() (9)
(9)
![]() (10)
– передаточная функция замкнутой САР
по заданию.
(10)
– передаточная функция замкнутой САР
по заданию.
Она определяет изменение регулируемых величин при изменении задания.
![]() (11)
– передаточная функция замкнутой САР
по нагрузке.
(11)
– передаточная функция замкнутой САР
по нагрузке.
Если в выражения (10) и (11) подставить конкретные передаточные функции и выполнить упрощающее преобразование, то можно получить:
(10)
=>
![]()
(11)
=>![]() (12)
(12)
В числителе и знаменателе передаточные функции выражения (12) представляют собой операторные многочлены.
![]() -
собственный оператор замкнутой САР,
отражающей ее внутренние свойства и ,
в частности устойчивость системы.
-
собственный оператор замкнутой САР,
отражающей ее внутренние свойства и ,
в частности устойчивость системы.
![]() -
оператор воздействия замкнутой САР по
нагрузке.
-
оператор воздействия замкнутой САР по
нагрузке.
(12)
(9)
=>![]()
![]() -
операторное уравнение замкнутой САР.
-
операторное уравнение замкнутой САР.
![]() (13)
(13)
Переходя в уравнении (13) к оригиналам, получим диф. уравнение замкнутой САР.
![]()

Многие задачи ТАУ, в частности, оценка устойчивости и качества переходных процессов могут решаться непосредственно с использованием операторных уравнений и передаточных функций САР.
31 Практика вывода уравнений и передаточных функций сар
Решение данной задачи содержит следующие этапы.
Исходными данными являются принципиальная и функциональная функции САР и описание системы.
Выбор уравнений динамики ОР и элементов регулятора.
Получение операторных уравнений элементов, включая ОР.
Преобразование операторных уравнений к уравнениям в передаточных функциях.
Построение структурных схем элементов САР.
Построение структурной схемы всей САР.
Если ОР описывается несколькими уравнениями, то следует вывести операторные уравнения и передаточные функции объекта.
Вывод передаточной функции регулятора.
Преобразование структурной схемы САР к стандартному виду.
Получение передаточной функции разомкнутой системы.
Вывод передаточных функций замкнутой САР.
Получение операторного уравнения замкнутой САР.
Получение дифференциального уравнения замкнутой САР.
Пример: вывод уравнений и передаточных функций САР частоты вращения турбогенератора (ТГ).

Предполагается, что в данном случае применяется система регулирования с параллельным kд.
Функциональная схема системы имеет вид.

Выбор уравнений элементов САР.
Турбогенератор рассматривается как одноёмкостный устойчивый объект
![]() (1)
(1)
![]() -
частота вращения ротора турбогенератора.
-
частота вращения ротора турбогенератора.
![]() -
положение парового регулировочного
клапана (положение ИМ)
-
положение парового регулировочного
клапана (положение ИМ)
![]() -
электрическая нагрузка ТГ
-
электрическая нагрузка ТГ
Измерительный элемент.
Датчик частоты вращения рассматривается как типовое инерционное звено.
![]() (2)
(2)
![]() (3)
(3)
![]() -
заданная частота вращения
-
заданная частота вращения
Параллельное КУ типа жесткой ОС.
![]() (4)
(4)
ЭС2
![]() (5)
(5)
ИМ рассматривается как типовое интегрирующее звено.
![]() (6)
(6)
Усилитель рассматривается как типовое пропорциональное звено.
![]() (7)
(7)
Получение операторных уравнений
(1)
=>
![]()
(2)
=>![]()
(3)
=>![]()
(4)
=>![]()
(5)
=>![]()
(7)
=>![]()
(6)
=>![]()
Получение уравнений в передаточных функциях.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Построение структурных схем элементов САР.


Построение структурной схемы САР.

ТГ описывается одним уравнением, и его дальнейшие преобразования не требуются.
Вывод или получение передаточных функций регулятора.
Для этого элементы регулятора нужно заменить одним звеном и найти передаточную функцию.

Структурная схема регулятора.
Заменяя последовательные соединения звеньев одним:

Получим замкнутый контур с ООС, найдем его передаточную функцию, которая и будет представлять собой передаточную функцию регулятора.

![]()
Представляем структурную схему САР в стандартном виде.

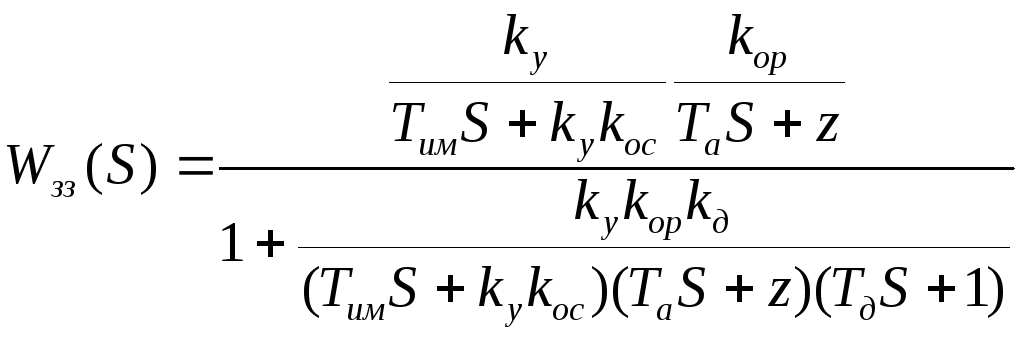
Получение передаточной функции разомкнутой САР.
![]()
![]()
![]()
Вывод функции замкнутой САР.
![]()
Упростим передаточную функцию.
![]()
![]()

![]()
Получение операторного уравнения замкнутой САР.
![]()
![]() - собственный оператор замкнутой САР
- собственный оператор замкнутой САР
![]() -
оператор воздействия замкнутой САР по
заданию.
-
оператор воздействия замкнутой САР по
заданию.
![]() -
оператор воздействия замкнутой САР по
нагрузке.
-
оператор воздействия замкнутой САР по
нагрузке.
Если в операторах замкнутой САР раскрыть скобки и привести подобные члены, то операторные уравнения замкнутой САР могут быть представлены в виде:
![]()
![]()
Получение диф. уравнения замкнутой САР.
Для этого надо в операторном уравнении замкнутой САР перейти к оригиналам.
![]()
![]()