

3 Принципы регулирования.
Принципы регулирования являются фундаментальным понятием ТАУ. Эти принципы определяют основу устройства регулятора и главные особенности его работы.
Существует три принципа регулирования:
По отклонению.
По возмущению.
Комбинированный.
3.1 Регулирование по отклонению
Схема САР, которая работает по принципу отклонения, называемому также принципом Ползунова-Уатта, приведена на рис. 2.1.
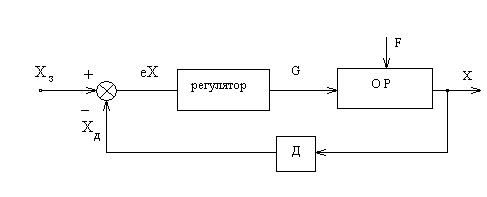
Рис. 2.1 Схема принципа регулирования по отклонению.
ОР – объект регулирования;
X - регулированная величина;
F – нагрузка объекта;
G – регулирующее воздействие;
Д – датчик регулируемой величины, выходной сигнал которого Хд соответствует действительному значению регулированной величины.
Регулирование по отклонению заключается в следующем:
на регулятор подаётся сигнал еХ = Хз - Хд – отклонение регулированной величины от заданного значения Хз (ошибка регулирования).
регулятор по сигналу еХ изменяет регулирующее воздействие G таким образом, чтобы уменьшить отклонение еХ.
Пример работы САР по принципу отклонения в случае изменения нагрузки объекта показан на рис. 2.2.
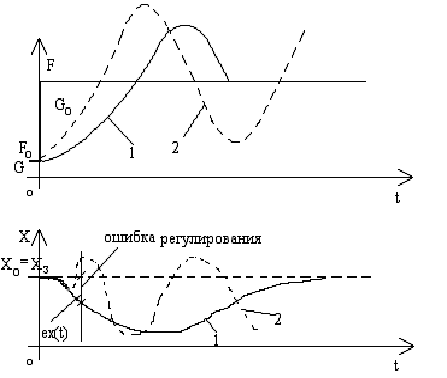
Рис. 2.2 Пример работы САР по принципу отклонения.
Особенности регулирования по отклонению:
Система регулирования, работающая по такому принципу, является замкну- той, когда сигнал с выхода системы подаётся на её вход.
Для таких систем существует проблема их устойчивости (см. лини 2).
Регулятор работает, то есть изменяет регулирующее воздействие G независи мо от причины вызвавшую ошибку регулирования.
Ошибка регулирования в данной системе принципиально не устранима, так как регулирующее воздействие формируется только по ошибке.
Измерение регулируемых величин (давления, уровня, частоты вращения, температуры и других) производится более простыми средствами, чем изме- рение возмущения.
По этим причинам данный принцип получил наибольшее распространение.
Рассмотрим проблему устойчивостии систем регулирования.
Линии 1 на рис. 2.2 соответствуют переходным процессам, когда регулируемая величина с течением времени принимает постоянное значение. Такие САР являются устойчивыми.
Однако параметры регулятора могут быть подобраны неверно или измениться в процессе эксплуатации, и регулирующее воздействие будет изменяться слишком сильно или несвоевременно. В результате величины системы будут колебаться с возрастающей амплитудой (линии 2 на рис. 3.2). В этом случае САР является неустойчивой и неработоспособной.
3.2 Регулирование по возмущению
Схема САР, которая работает по принципу отклонения, называемому также принципом Понселе, приведена на рис. 2.3.
![]()
Рис. 2.3 Схема принципа регулирования по возмущению.
Регулирование по возмущению заключается в следующем:
Датчик нагрузки объекта регулирования ДН измеряет нагрузку объекта. Сиг нал на его выходе Fд соответствует действительной нагрузке F. Регулятор по сигналу Fд изменяет регулировочное воздействие G, т.о. чтобы значение регулируемой величины Х оставалось постоянной. Например, при регулировании по возмущению давления пара в котле на 50% должно вызвать увеличение регулятором расходы топлива в котёл на 50 %.
Работа САР по принципу регулирования по возмущению показана на рис. 2.4.

Рис. 2.4 Работа САР по принципу регулирования по возмущению.
Теоретически регулирующееное воздействие изменяется одновременно с изменением нагрузки (G1 – теоретическое изменение регулирующего воздействия), и регулируемая величина при этом должна оставаться постоянной.
Особенности регулирования по возмущению:
Данный принцип реализуется с помощью разомкнутых систем. Поэтому проблема устойчивости здесь отсутствует.
Регулятор формирует регулирующее воздействие одновременно с изменением возмущения, что теоретически позволяет регулировать без ошибки (линии G1 и X1 на рис. 2.4).
Регулятор реагирует только на измеряемые возмущения.
Измерение возмущений требует исполнение более сложных технических средств, чем измерение регулируемых величин.
Применение данного способа требует точного учёта характеристик объекта и регулирующих органов, что на практике не достижимо.
Это может вызвать недопустимую ошибку регулирования (линии G2 и X2 на рис. 2.4). По этим причинам регулирование по возмущению на судах не применяется.