

1 Введение в автоматику.
Основные понятия автоматики.
Принципы регулирования:
- регулирование по отклонению, - регулирование по возмущению, - комбинированное регулирование.
Типовые САР: - с параллельным КУ, - с последовательным КУ, - комбинированная система.
Общие понятия о статических характеристиках САУ.
Классификация САУ,
Задачи анализа САУ для судовых электромехаников.
Общие свойства объектов регулирования.
Уравнения динамики объектов регулирования. Общий подход.
Уравнение динамики турбогенератора.
Основные свойства одноемкостных объектов.
Основные свойства преобразования Лапласа.
Операторные уравнения.
Передаточные функции.
Структурные схемы и их преобразование.
Типовые воздействия.
Частотные характеристики. Общие понятия.
Аналитический расчет частотных характеристик.
Расчет АФЧХ систем без запаздывания и с запаздыванием.
Логарифмические частотные характеристики.
Общие понятия о типовых динамических звеньях.
Апериодическое (инерционное) звено.
Усилительное звено.
Интегрирующее звено.
Инерционное звено.
Колебательное звено.
Идеальное дифференцирующее звено.
Реальное дифференцирующее звено.
Дифференцирующее звено 1-го порядка.
Звено запаздывания.
Уравнения и передаточные функции САР.
Основные понятия устойчивости.
Непосредственная оценка устойчивости.
Критерий Рауса-Гурвица.
Критерий Михайлова.
Критерий Найквиста.
Запасы устойчивости.
Влияние коэффициента усиления разомкнутой САР и запаздывания на устойчивость.
Показатели качества переходных процессов.
Аналитический расчет переходных процессов.
Численный расчет переходных процессов.
Типовые объекты регулирования.
Одноемкостный устойчивый объект.
Одноемкостный нейтральный объект.
Одноемкостный неустойчивый объект.
Безъемкостный объект.
Двухемкостный устойчивый объект.
Двухъемкостный нейтральный объект.
Многоемкостный устойчивый объект.
Многоемкостный нейтральный объект.
Законы регулирования.
Получение законов регулирования в последовательных КУ.
Изменение сигналов на выходе последовательных КУ.
Основные понятия автоматики
Для наглядности формирования общих теоретических понятий автоматики рассмотрим судовой паровой подогреватель топлива (рис. 1.1).
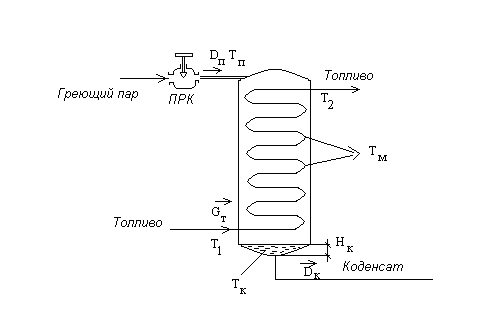
Рис. 1.1 Паровой подогреватель топлива.
Рабочие процессы подогревателя характеризуются следующими величинами:
Gt – расход топлива.
T1, T2 – температура топлива на входе и выходе подогревателя.
Dп, Tп – расход греющего пара.
Pk – давление в корпусе подогревателя.
Tм – температура металла трубок поверхности нагрева.
Tk – температура конденсата.
Hk – высота уровня конденсата.
Dk – расход конденсата.
Назначение подогревателя заключается в подогреве топлива до температуры T2, которая должна поддерживаться достаточно в узких пределах.
Изменение температуры T2 может быть вызвано: - изменением Gt, Dп , Tп, T1, - загрязнением поверхностей нагрева.
Ручное управление подогревателем состоит в том, чтобы при изменении температуры T2 производить ручное воздействие на регулирующий паровой клапан (ПРК), поддерживая температуру T2 постоянной.
Все величины определяющие состояние объекта регулирования (парового подогревателя) делятся на несколько групп, в зависимости от той роли, которую они играют в процессах регулирования и управления.
Величины, отражающие состояние объекта и измеряемые в процессе его работы называются – контролируемыми: T2, Pk.
Величина из числа контролируемых, по которой ведётся процесс регулирования называется – регулируемой величиной: T2.
Остальные величины, определяющие состояние объекта, но не измеряемые называются – неконтролируемыми: Tм, Hk, Dk, Tk.
Величины, отражающие внешнее влияние на объект называются – воздействиями: Dп, Tп, Gt, T1.
Воздействие на объект, вырабатываемое человеком или автоматическим управляемым устройством, называется – регулирующим: Dп.
Остальные воздействия называются – возмущениями: Tп, Gt, T1.
Главное возмущение обычно называют – нагрузкой объекта: Gt.
Остальные возмущения часто называют – помехами.
Рабочий процесс подогревателя требует поддержания постоянной температуры топлива на его выходе (регулируемой величины).
В автоматизированном подогревателе это происходит без участия человека с помощью специального устройства, называемого регулятором температуры (см. рис. 1.2).

Рис. 1.2 Схема автоматического регулирования подогревателя топлива.
Автоматическим регулированием называется поддержание постоянной или меняющейся по некоторому закону величины, характеризующей производственный процесс, путём измерения состояния объекта и (или) действующих на него возмущений и воздействия на регулирующий орган объекта.
В нашем примере АПРТ заключается в поддержании постоянного значения температуры топлива на выходе путём измерения этой температуры, т.е. состояние объекта и воздействие на регулирующий паровой клапан.
При эксплуатации судового оборудования приходится выполнять значительное количество операций, например для дизель-генератора (ДГ):
ввод в действие;
вывод в номинальный режим по частоте вращения;
поддержание заданной частоты вращения при изменении нагрузок потребителя электроэнергии;
защита в аварийных ситуациях;
вывод из действия и другие операции.
Выполнение всех этих операций объединяется термином управление. Если управление происходит без участия человека, то оно называется автоматическим управлением (АУ).
Агрегат или механизм, в котором протекает процесс, подлежащий регулированию, называется объектом регулирования (ОР).
Агрегат или механизм, в котором протекают процессы, подлежащие управлению, называются объектом управления (ОУ).
Практически все агрегаты СЭУ и СЭЭС являются объектами регулирования и управления.
Вся СЭУ в судовой электроэнергетики является сложным объектом управления. Операции регулирования входят в состав операций управления
Взаимодействующие между собой ОР и автоматическое регулирующее устройство образуют систему автоматического регулирования (САР), общая схема которой показана на рис. 1.3. Таким образом, выше была рассмотрена САР температуры топлива.
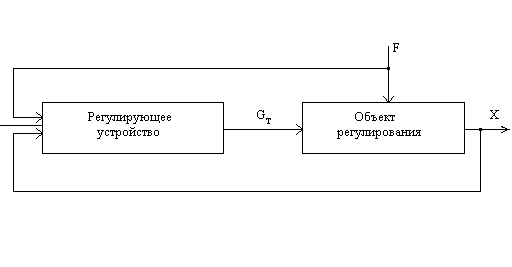
Рис. 1.3 Общая схема автоматического регулирования
Взаимодействующие между собой ОУ и автоматическое управляющее устройство образуют систему автоматического управления (САУ).
Рабочий процесс в судовых агрегатах и механизмов, то есть. в судовых ОР, связан в протекании через них потоков энергии вещества.
Если воздействия на объект не изменяются, то все величины определяющие состояние объекта также не изменяются во времени. Такое состояние объекта называется равновесным или установившимся.
При изменении воздействия во времени изменяются величины определяющие состояние ОР. Такое состояние называется неравновесным или неустановившимся. Понятие равновесного или неравновесного состояния относится также и ко всей системе регулирования.