

3. 3 Комбинированный принцип.
Данный принцип, схема которого приведена на рис. 3.5, является объединением двух предыдущих.
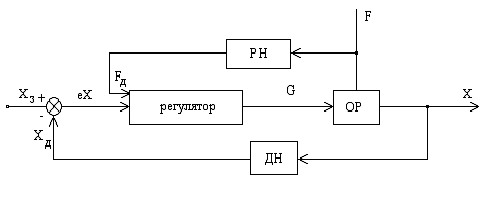
Рис. 2.5 Схема комбинированного принципа регулирования.
Данный регулятор обладает достоинствами двух предыдущих принципов, но конструктивно является более сложным, так как он содержит элементы измерения регулируемой величины и нагрузки, а также элементы преобразования регулирования и нагрузки в регулирующее воздействие.
Рассмотрим работу САР с комбинированным принципом при увеличении нагрузки ОР по переходным процессам, показанным на рис. 2.6.
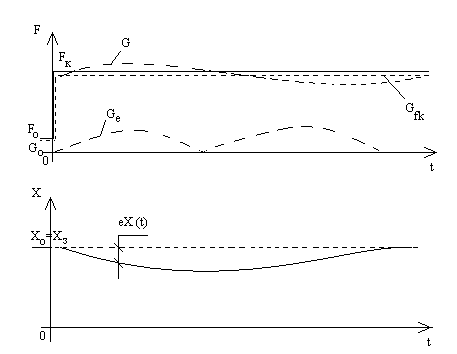
Рис. 2.6 Работа САР по комбинированному принципу.
Регулирующие воздействие G является суммой двух составляющих.
G=Gf+Ge
где Gf – составляющая, вырабатываемая каналом регулирования по возмущению.
Ge – составляющая, вырабатываемая каналом регулирования по ошибке.
При изменении нагрузки канал регулирования по отклонению сразу создаёт регулирующее воздействие Gf=Gf k, приблизительно соответствующее новой нагрузке. Возникающая при этом ошибка регулирования будет формировать воздействие Ge.
Поскольку ex(t) – ошибка регулирования в этом случае будет значительно меньше, чем при использования регулирования по отклонению, к каналу регулирования по отклонению могут быть предъявлены менее жесткие требования и задачи устойчивости САР могут быть решены достаточно просто.
Примером применения комбинированного принципа может служить двух импульсный регулятор уровня воды в котле, в котором имеется:
- канал формирования регулирующего воздействия (расхода питательной воды в котёл) по отклонению уровня воды в котёл в верхнем коллекторе котла от среднего значения;
- канал формирования регулирующего воздействия по нагрузке (расход пара из котла).
В связи с широким внедрением микропроцессорной техники в судовых средствах автоматизации, когда алгоритмы преобразования сигналов представляют собой программу вычислений, в том числе, и для самых сложных алгоритмов комбинированный принцип является наиболее перспективным.
4 Типовые системы автоматического регулирования
Функциональным элементом САР – называется отдельный блок или программный модуль, выполняющие одну определённую операционную функцию, преобразования входной величины X и выходную величину Y (см. рис. 4.1).

Рис. 3.1 Функциональный элемент САР.
Судовые САР имеют огромное количество блоков, различных по конструкции, принципу действия используемой энергии. Однако если рассматривать только функции, выполняемые этими блоками, то всё множество блоков можно разделить на несколько групп по функциям, которые они выполняют.
Всё множество САР в этом случае можно представить как несколько типовых САР с типовыми функциональными схемами.
Оновными из этих типов являются следующие:
системы с параллельным корректирующим устройством (КУ);
системы с последовательным КУ;
комбинированные системы, содержащие параллельные и последовательные КУ;
каскадные системы.
4.1 САР с параллельным КУ
![]()
З – задатчик, формирующий сигнал с заданного значения регулируемой величины Хз;
Д – датчик, выходной, сигнал которого соответствует действительному значению регулируемой величины;
ЭС1 – элемент сравнения, формирующий сигнал еХ равный Хз-Хд, отклонения регулируемой величины от заданного значения.
еХ – ошибка регулирования.
У – усилитель, который повышает мощность входного сигнала Uвх до уровня необходимого для перемещения регулируемого органа с требуемой скоростью.
ИМ – исполнительный механизм, преобразующий выходной сигнал усилителя Uу в механическое перемещение М (сервомотор, актуатор).
РО – регулируемый орган, жестко связанный с ИМ и оказывающий непосредственное регулирующее воздействие на объект G.
КУ – параллельное корректирующие устройство, предназначено для обеспечения качества работы САР. Как правило, КУ представляют собой обратные связи регулятора. Выходной сигнал КУ (Хос) вычитается из сигнала отклонения eX в элементе сравнения ЭС2.
Таким образом:
Uвх = eX – Xос – входной сигнал усилителя.
Это означает, что обратная связь является отрицательной.
Рассмотрим работу регулятора при скачкообразном изменении сигнала
ошибки eX.

1 – перемещение ИМ при отсутствии параллельного КУ.
2 - перемещение ИМ при наличии параллельного КУ.
Т.о. параллельное КУ уменьшает сигнал на выходе усилителя Uу, что в свою очередь замедляет перемещение ИМ. Это благоприятно сказывается на работе всей системы регулирования.
В данных регуляторах затрудненно применение электронной и микропроцессорной техники. Их нельзя собирать при наборе унифицированных элементов. Поэтому применение на судах регуляторов с параллельным КУ уменьшается.
САР с последовательным КУ.

КУ- последовательное КУ, предназначено для обеспечения требуемого качества работы САР.
Это достигается за счет преобразования в последовательном КУ сигнала отклонения по формуле закона регулирования
![]()
В данных системах коэффициент усиления усилителя должен быть ограничен.
В данных системах достаточно удобно применять электронную и МП технику, регуляторы можно собирать из набора унифицированных элементов, поэтому данные системы получили на судах широкое применение.
Комбинированные системы регулирования.

Система содержит:
Последовательное КУ, формирующее закон регулирования, для получения требуемого качества работы системы.
Параллельное КУ, роль которого играет датчик положения используемого механизма (ДПИМ). Этот датчик преобразует перемещение ИМ М, сигнал Хос, т.о., что в откос переменных
Хос = М

На
равновесных режимах работы системы![]()
![]()
Т.о. элементы, образующие контур с ОС (ЭС2, У, ИМ, ДМИМ) обеспечивают перемещение ИМ в положение, заданное входным сигналом контура
Т.о. контур, охваченный ОС представляет собой следящую систему, которая перемещает ИМ в соответствии с входным сигналом и Uку играет роль сигнала заданного положения ИМ.
Мз = Uку
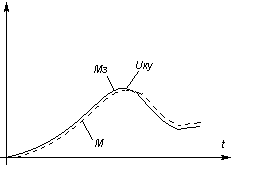
Пример работы следящей системы:
Так как усилитель и ИМ охвачены ООС, то в заданной САР отсутствуют жесткие требования к коэффициенту усиления усилителя. Также в данном регуляторе удобно применять электронную и МП технику и собирать из унифицированных элементов.
Данная схема позволяет организовать дистанционное управление регулирующего органа.

Следящая система содержит элементы показанные на предыдущей схеме, её назначением является перемещение ИМ в положение М равное входному сигналу Мз.
Мзр выходной сигнал КУ, представляющий собой заданное положение ИМ при работе регулятора.
БДУ – блок дистанционного управления.
Мзд – заданное положение ИМ при дистанционном управлении.
ПУ – переключатель управления.
При АУ: Mз = Мзр
При ДУ: Mз = Мзд
Данная типовая САР широко применяется на судах, например для регулирования частоты вращения главных судовых дизелей.