

5 Статические характеристики систем регулирования

Пусть САР находится на равновесном режиме при минимальной нагрузке объекта. Измерим значение регулируемой величины и нагрузки и занесём их значения в таблицу.
|
F |
F1 |
F2 |
… |
Fn |
|
X |
X1 |
X2 |
… |
Xn |
Изменим нагрузку объекта и после выхода САР на новый равновесный режим запишем новые значения F и x и так поступим несколько раз до полной нагрузки объекта.
Построим график зависимости регулируемой величины от нагрузки на равновесных режимах.
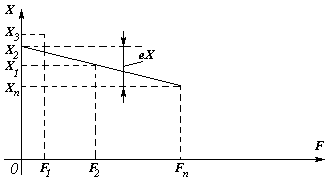
Полученный график представляет собой статическую характеристику САР.
eXст - статическая ошибка системы регулирования.
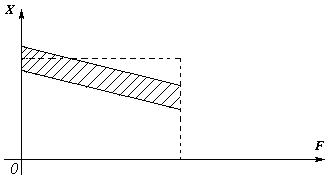
Статические характеристики, полученные на реальных системах имеют вид зоны.
Статической характеристикой САР называется зависимость регулируемой величины от нагрузки на равновесных режимах работы системы.
6 Классификация систем автоматического регулирования.
Классификация систем позволяет разделить всё множество САУ на относительно небольшое число групп с характерными признаками.
Поэтому классификация позволяет составить характеристику системы по её признакам и тем самым определить рабочие свойства системы.
По назначению (по характеру задающего воздействия).
1.стабилизирующие.
2.программные.
3.следящие.
Стабилизирующими – называют САУ, которое предназначено для поддержания постоянного значения регулируемой величины, например, давление пара в котле, частоты тока в судовой сети и другие.
Большинство судовых САУ являются стабилизирующими.
Программные САУ изменяют регулируемую величину по заранее заданному закону.

Программными являются системы управления частотой вращения главных судовых дизелей. В этих системах перевод дизеля с одного режима работы на другой производится путём линейного изменения для регулятора частоты вращения главного дизеля.
Следящие системы предназначены для изменения регулируемой величины по закону, который заранее неизвестен и может быть произвольным.
Например: следящими являются системы регулирования расхода воздуха в судовом паровом котле.
По наличию усилителя САУ делится на:
система прямого действия.
система непрямого действия.
Если в системе имеется усилитель, питающийся от постороннего источника энергии по отношению к регулируемой величине, то это система непрямого действия. В системах прямого действия усилитель отсутствует.
Система прямого действия используется там, где не требуется высокой точности и быстродействия.
По виду используемой энергии САУ бывают:
1.Механические
2.Гидравлические
3.Пневматические
4.Механико-гидравлические
5.Электронно-гидравлические
6.Электронно-пневматические
На судах главным образом используются электрические и электро-пневматические системы, иногда пневматические.
Механико-гидравлическим часто бывает регулятор частоты вращения дизель-генератора.
По характеру изменения сигналов САУ бывают:
1.Непрерывные.
2.Релейные.
3.Дискретные.
Непрерывными называются САУ в каждом элементе которых непрерывному изменению на выходе соответствует непрерывное изменение сигнала на выходе.
![]()
Пример непрерывного элемента
Непрерывными как правило являются механические, гидравлические и пневматические системы.
Релейными называется САУ, хотя бы в одном элементе которых непрерывному изменению сигнала на выходе соответствует скачкообразное изменение сигнала на выходе. Такой элемент называется релейным.
![]()
Пример характеристик релейных элементов.
![]()
Такие элементы используются в системах сигнализации и защиты.

Такими элементами являются усилители в электрических САУ, где ИМ содержит АД переменного тока.

Элемент с зонами нечувствительности и возврата. Эти элементы применяются для формирования управляющих воздействий в электрических САУ.
Такие элементы применяются в системах двух замкнутого регулирования, например давление пара в судовом паровом вспомогательном котле.
Дискретными – называются САУ, хотя бы в одном элементе которых непрерывному изменению сигнала на входе соответствует выходной сигнал в виде импульса. Такой элемент называется дискретным.
Примером может служить широтно-импульсный модулятор, применяемый для получения переменной частоты вращения ЭД ИМ
![]()
![]()
На входе ШИМ поступает непрерывный сигнал х, выходной сигнал y,представляет собой последовательность импульсов постоянного периода Ту и переменной длительности Ти.
![]()
По математическому описанию САУ делятся на линейные и нелинейные.
Каждый элемент САУ характеризуется зависимостью изменению выходного сигнала от изменения входного. Эта зависимость описывается как правило дифференциальным уравнением, иногда алгебраическим.
Если каждый элемент САУ описывается линейным уравнением, то система называется линейной. Если хотя бы один элемент САУ описывается нелинейным уравнением, то система называется нелинейной. Дискретные и релейные системы являются нелинейными.
Практически все реальные САУ являются нелинейными, линейными их можно представит лишь приближенно.
По виду статической характеристики САУ делятся на:
1.Статические
2.Астатические
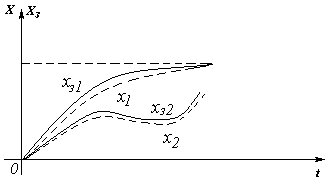
Если значение регулируемой величины на равновесных режимах работы САУ зависит от нагрузки, то такая система называется статической.

![]()
![]()
Статическая характеристика статической системы.
1 – убывающая статическая характеристика.
2 - возрастающая статическая характеристика.
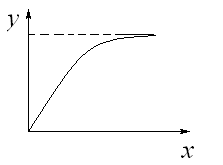
Если регулируемая величина на равновесных режимах не зависит от нагрузки, то такая система называется астатической
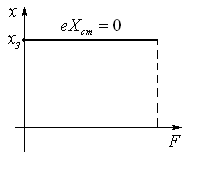
Статическая характеристика астатической системы
Кроме того, САУ классифицируются по следующим признакам:
- по принципу регулирования;
- по виду функциональной схемы;
- по закону регулирования.