При ч а с т и ч н о й а в т о м а т и з а ц и и система автоматиче ского управления движением судна по курсу обеспечивает стаби лизацию судна на курсе, а также изменение курса на определен ную величину по заданию оператора, т. е. выполняет функции современных авторулевых. Этот уровень автоматизации сохра нится и в будущем для мало- и среднетоннажных судов, для кото рых разработка системы комплексной автоматизации судовожде ния может быть экономически не оправдана. Перспективной для этой категории судов является разработка электронных схем авто рулевых с использованием полупроводниковых и логических эле ментов, а также создание автономных универсальных самона страивающихся систем по типу польской системы TS, описанной
в § 4.
Другим перспективным направлением является расширение функций авторулевых за счет использования информации от дру гих судовых навигационных систем.
Современные суда оборудуются целым комплексом электрорадионавигационных приборов и систем, обеспечивающих судово дителя всей необходимой информацией для управления судном в различных условиях плавания. Однако человек не всегда в со стоянии своевременно и правильно оценить и использовать эту информацию, что снижает эффективность управления.
Функции авторулевого могут быть значительно расширены, если связать его не только с гирокомпасом, но и с некоторыми другими электрорадионавигационными приборами. Например, связав авторулевой с гидролокатором, можно получить систему, которая позволит автоматически менять курс при появлении под водной опасности на пути движения судна. В настоящее время ве дутся работы по созданию системы автоматического расхождения судов в открытом море. Эта система будет работать от судовой радиолокационной станции, позволяющей определять пеленг и рас
стояние до встречного судна |
(или нескольких судов) и выбирать |
необходимые маневры |
для |
безопасного расхождения. |
Сигналы |
об изменении заданного |
курса судна могут поступать |
непосред |
ственно в авторулевой или на специальный индикатор. Авторуле вой в этом случае должен иметь программирующее устройство, позволяющее менять курс судна на любую заданную величину от О до 180° с последующим автоматическим возвращением судна на прежний курс после ликвидации опасной ситуации.
На рис. V.10 в качестве примера комплексного использования навигационной информации показана предложенная одной из фирм США упрощенная структурная схема системы, которая обеспечивает стабилизацию судна на заданном курсе с использо ванием гирокомпаса ГК и специального гиротахометра ГТ, а также осуществляет автоматическое управление судном при расхожде нии со встречными судами по сигналам от специального радиоло кационного устройства и плавание судна по дуге большого круга
с помощью программирующей приставки ПП. |
Установленный |
в пульте управления авторулевого нуль-индикатор |
угловой ско |
9 . С .'Я . Березин, Б. А. Тетюев |
249 |
рости поворота судна НИ, работающий от гиротахометра или гирокомпаса, существенно облегчает ручное управление судном при маневрировании.
Для судов промыслового и вспомогательного флотов могут быть созданы специальные схемы авторулевых, выполняющих те или иные специфические задачи управления судном. Так, на пример, в ФРГ разработана система автоматического управления рулевым приводом судна, связанная с эхолотом. Она предназна чена для установки на рыболовных судах и используется при тра
лении [31].
Одной из задач дальнейшего совершенствования САУ движе нием судна по курсу является дальнейшая работа по технико-
Рис. V.10. Упрощенная структурная схема САУ дви жением судна по курсу при комплексном использова
нии электрорадионавигационной |
информации. |
Р У — ручное |
управление; УР — устройство |
для расхождения |
судов; ИМ — исполнительный |
механизм; |
РМ — рулевая ма |
шина; |
ЭА — электронный |
авторулевой; Р — руль. |
эстетическому оформлению пультов управления систем автомати ческого управления движением судов по курсу с учетом новейших требований инженерной психологии.
Органы управления и настройки авторулевых, а также их ин дикаторные устройства должны быть спроектированы так, чтобы
они в |
максимальной степени облегчали работу судоводителей |
в процессе эксплуатации системы на |
судне. Целесообразно, на |
пример, |
заменить плавную настройку |
коэффициента внутренней |
отрицательной обратной связи системы на фиксированную, преду смотрев три положения переключателя: «Порожнем», «В бал
ласте» и «С грузом».
Следует отметить, что автоматизация отдельных процессов су довождения, осуществляемая с помощью различных приставок к существующим приборам, значительно усложняет электрорадионавигационное оборудование судов и его эксплуатацию, не ре шая при этом задачу автоматического управления судном
в целом.
Для резкого повышения безопасности мореплавания, сокраще ния потерь ходового времени, уменьшения обслуживающего пер сонала и облегчения труда плавсостава необходимо разработать
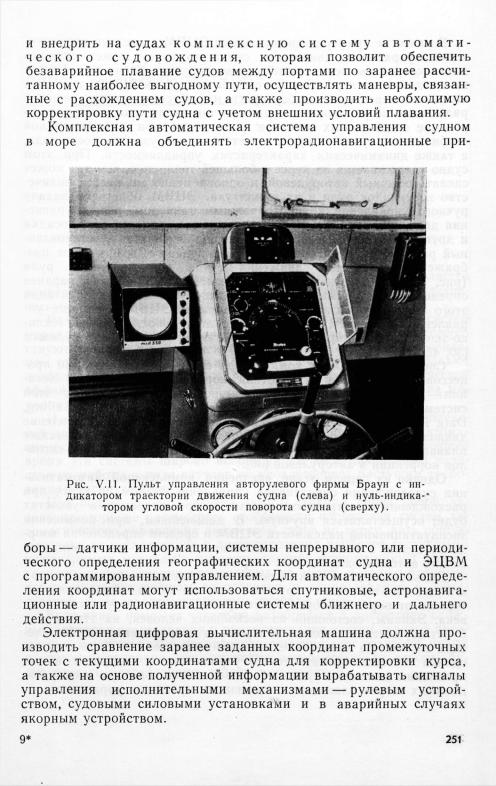
В качестве примера использования ЭЦВМ в системе автомати ческого управления движением судна по курсу может служить многоцелевой вычислительный комплекс, установленный в 1969 г. на шведском танкере «Sea Sovereign» дедвейтом 210 000 т. ЭЦВМ этого комплекса имеет набор программ, обеспечивающих решение ряда задач по управлению судном, в том числе таких, как форми рование оптимальных сигналов управления при автоматической стабилизации судна на курсе с учетом его загрузки, скорости хода, а также динамических характеристик управляемости. При этом судно удерживается на курсе с большей точностью, чем это может сделать обычный авторулевой, и одновременно снижается количе ство перекладок руля и их амплитуда. ЭЦВМ облегчает задачу ручного управления крупнотоннажным танкером, решая уравне ния движения судна по курсу с учетом его скорости хода, осадки и других факторов и выдавая на специальный экран, установлен ный рядом с пультом управления авторулевого, графическое изо
бражение траектории |
движения судна под |
действием руля |
(рис. V.11). Пользуясь |
этим экраном, рулевой |
может заранее |
определить требуемый угол перекладки руля. Опыт эксплуатации этого танкера показал, что использование ЭЦВМ в системе уп равления движением судна по курсу дает дополнительный техни ко-экономический эффект по сравнению с обычным авторулевым
[30, 45].
Специализированная комплексная система автоматизации про цессов судовождения разработана норвежской компанией Noratorn— Norcontrol. Навигационно-вычислительный комплекс этой системы Data Bridge, состоящий из трех подсистем: Data Sailing, Data Radar и Data Pilot, обеспечивает оптимальное управление движением судна по курсу и по заданной траектории, а также плавание по дуге большого круга с автоматическим вводом сигна лов коррекции в авторулевой [30].
Однако на первом этапе внедрения комплексной автоматиза ции судовождения оперативное управление судном по курсу при расхождении со встречными судами и при плавании в узкостях будет осуществляться вручную. В дальнейшем, при повышении эксплуатационной надежности ЭЦВМ и средств определения коор динат судна, а также при повышении точности последних воз можна автоматизация и этих операций.
Дальней перспективой является создание п о л н о с т ь ю а в т о м а т и з и р о в а н н ы х крупнотоннажных судов, управление ко торыми от порта до порта будет производиться без участия чело века. Экипаж, состоящий из нескольких человек, на этих судах будет осуществлять только контроль за исправностью автоматиче ских систем. На этом этапе автоматизации должна быть создана единая система автоматического управления по скорости и на правлению движения судна, обеспечивающая минимум эксплуата ционных затрат благодаря оптимизации процессов управления.
Заключение
Комплексная автоматизация на судах является в настоящее время одним из основных направлений научно-техни ческого прогресса на морском транспортном флоте.
Разработка и внедрение комплексных автоматических систем управления судовыми механизмами и судном в целом способ ствуют повышению безопасности мореплавания при одновремен ном сокращении численности экипажа судов, а также создают необходимые предпосылки к повышению технико-экономической эффективности работы флота и его конкурентоспособности на ми ровом рынке.
Исключительно важная и ответственная роль в деле комплекс ной автоматизации судовождения принадлежит системам автома тического управления движением судов по курсу. В настоящее время эти системы широко используются на судах, однако каче ство их работы в ряде случаев не удовлетворяет растущим требо ваниям эксплуатации.
При подготовке монографии авторы ставили перед собой за дачу всесторонне рассмотреть особенности построения систем ав томатического управления движением судов по курсу, дать общую методику их исследования и проектирования наиболее доступными инженерными методами, показать технико-экономическую эффек тивность использования авторулевых на судах, а также раскрыть перспективы дальнейшего их развития и использования в комп лексной системе автоматического судовождения.
Если книга поможет читателю разобраться в достаточно слож ных вопросах исследования и проектирования систем судовой авто матики и найти новые технические решения при создании новых и совершенствовании существующих авторулевых, то авторы бу дут считать поставленную задачу выполненной.
Приложение
Ф у н к ц и я Р * ( О ) * )
(0* |
0 |
0,05 |
0,10 |
0,15 |
0,20 |
|
|
|
|
|
0, 5 |
0,9589 |
0,9567 |
0,9543 |
0,9518 |
0,9490 |
1,0 |
0,8415 |
0,8331 |
0,8241 |
0,8142 |
0,8035 |
1,5 |
0,6650 |
0,6474 |
0,6282 |
0,6074 |
0,5850 |
2,0 |
0,4546 |
0,4260 |
0,3948 |
0,3610 |
0,3249 |
2,5 |
0,2394 |
0,1995 |
0,1560 |
0,1093 |
0,0595 |
3,0 |
0,0470 |
—0,0029 |
—0,0572 |
—0,1152 |
—0,1765 |
3,5 |
—0,1002 |
—0,1579 |
—0,2202 |
—0,2864 |
—0,3554 |
4,0 |
—0,1892 |
—0,2514 |
—0,3184 |
—0,3887 |
—0,4606 |
4,5 |
—0,2172 |
—0,2808 |
—0,3487 |
—0,4189 |
—0,4891 |
5,0 |
—0,1918 |
—0,2540 |
—0,3196 |
—0,3860 |
—0,4501 |
5,5 |
—0,1283 |
—0,1870 |
—0,2481 |
—0,3080 |
—0,3629 |
6,0 |
—0,0466 |
—0,1009 |
—0,1561 |
—0,2083 |
—0,2524 |
6,5 |
0,0330 |
—0,0169 |
—0,0667 |
—0,1109 |
—0,1439 |
7,0 |
0,0939 |
0,0472 |
0,0020 |
—0,0352 |
—0,0586 |
7,5 |
0,1251 |
0,0824 |
0,0380 |
0,0056 |
—0,0099 |
8,0 |
0,1237 |
0,0789 |
0,0378 |
0,0084 |
—0,0016 |
8,5 |
0,0939 |
0,0478 |
0,0062 |
—0,0219 |
—0,0284 |
9 ,0 |
0,0458 |
—0,0027 |
—0,0458 |
—0,0737 |
—0,0780 |
9 ,5 |
—0,0079 |
—0,0590 |
—0,1039 |
—0,1318 |
—0,1344 |
10,0 |
—0,0544 |
—0,1077 |
—0,1539 |
—0,1814 |
—0,1817 |
10,5 |
—0,0838 |
—0,1384 |
—0,1849 |
—0,2106 |
—0,2075 |
11,0 |
—0,0909 |
—0,1457 |
—0,1910 |
—0,2135 |
—0,2055 |
11,5 |
—0,0761 |
—0,1299 |
—0,1728 |
—0,1906 |
—0,1762 |
12,0 |
—0,0447 |
—0,0969 |
—0,1360 |
—0,1481 |
—0,1262 |
13,0 |
0,0323 |
0,0150 |
—0,0464 |
—0,0460 |
—0,0091 |
14,0 |
0,0708 |
0,0260 |
0,0004 |
0,0107 |
0,0585 |
15,0 |
0,0433 |
—0,0022 |
—0,0257 |
—0,0100 |
0,0424 |
16,0 |
—0,0180 |
—0,0661 |
—0,0894 |
—0,0708 |
—0,0179 |
17,0 |
—0,0566 |
—0,1060 |
—0,1276 |
—0,1051 |
—0,0519 |