

1.4. Кинематический и структурный анализ плоских стержневых систем
Реальные строительные конструкции и сооружения не должны изменять свою форму и размеры под действием нагрузки без деформации элементов их образующих. Такие конструкции и сооружения называются геометрически неизменяемыми. Очевидно, что и расчётные схемы (системы) таких конструкций должны быть геометрически неизменяемыми.
1.4.1. Кинематический анализ стержневых систем
Для того чтобы установить неизменяемость системы, необходимо проводить её кинематический анализ. При кинематическом анализе плоской стержневой системы определяется число степеней свободы системы по формуле
![]() (1)
(1)
где Д - число дисков, образующих систему;
Ш - число простых шарниров, соединяющих диски;
![]() -
число опорных связей.
-
число опорных связей.
Число степеней свободы системы W равно числу независимых геометрических параметров, определяющих положение всех точек системы при возможном перемещении её элементов.
Определённое по формуле (1) число степеней свободы системы называется степенью изменяемости системы.
Дисками при кинематическом анализе системы называются геометрически неизменяемые части системы. Например, дисками являются (рис. 1.8):
отдельные стержни, образующие систему;
несколько стержней, соединенных жесткими узлами (ломаные стержни);
три стержня, соединённых шарнирами и образующие треугольник.
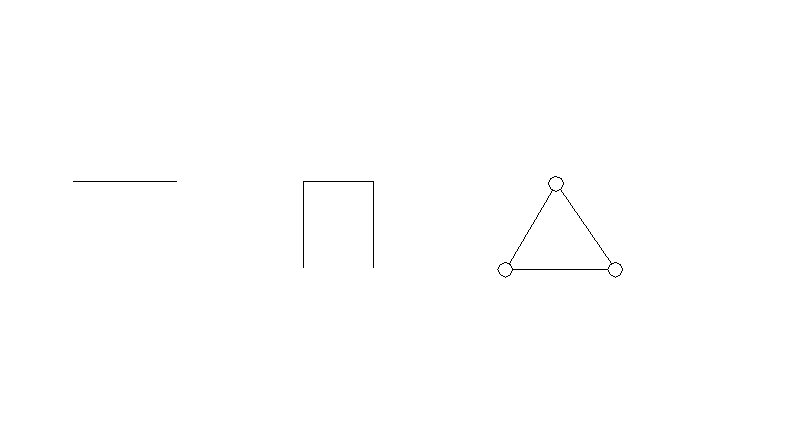
а) б) в)
Рис. 1.8. Примеры дисков
Диск на плоскости имеет три степени свободы, его положение при перемещении можно описать тремя геометрическими параметрами:
линейными перемещениями u и v;
углом поворота
![]() .
.
Поэтому система из Д свободных дисков имеет 3Д степеней свободы.
Простым шарниром называется шарнир, соединяющий на расчётной схеме два стержня (рис. 1.9). Если шарниром на расчётной схеме соединяется С стержней, то в этом случае число простых шарниров определяется по формуле
Ш=С – 1. (2)

Ш=1 Ш=2
Простой шарнир Сложный шарнир
Рис. 1.9. Простой и сложный шарниры.
Каждый простой шарнир отнимает у системы две степени свободы.
Число
опорных связей
![]() определяется типом опор на расчётной
схеме. На рис. 1.10 приведены типы опор и
соответствующее им число опорных связей
С0.
определяется типом опор на расчётной
схеме. На рис. 1.10 приведены типы опор и
соответствующее им число опорных связей
С0.
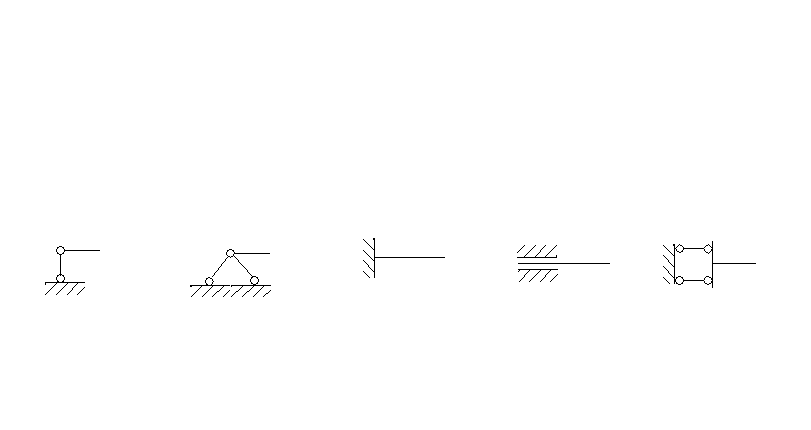
C0=1 C0=2 C0=3 C0=2 C0=2
Рис. 1.10. Типы опор и соответствующее им число связей
Каждая опорная связь отнимает у системы одну степень свободы.
Полученное по формуле (1) значение W позволяет делать следующие выводы:
Если W>0, то система является геометрически изменяемой и по определению не может служить в качестве расчётной схемой сооружения.
Если W<0, то это условие необходимое, но недостаточное для того, чтобы система была геометрически неизменяемой. В этом случае требуется проводить дополнительно структурный анализ системы.