

2.2.2 Метод сечений.
В основе метода сечений лежит следующее утверждение:
Если система находится в состоянии равновесия под действием заданной нагрузки и реакций опор, то и любая отсеченная часть системы также находится в состоянии равновесия под действием внешней нагрузки, реакций опор и внутренних сил, приложенных в сечении.
Алгоритм определения внутренних усилий в поперечном сечении стержня любой стержневой статически определимой системы (балка, рама, ферма, арка и др.) методом сечения включает следующие операции:
определение реакций опор;
разделение системы сечением на две части;
выбор для определения внутренних усилий одной из частей системы;
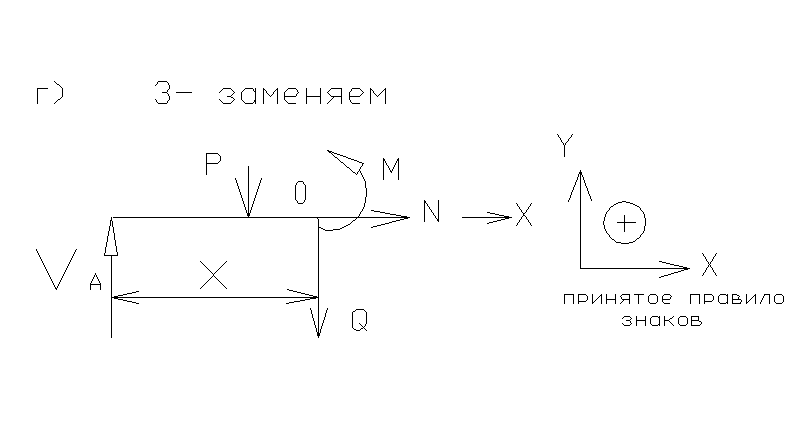
изображение в поперечном сечении внутренних усилий N и Q в положительном направлении, а изгибающего момента М произвольно, то есть по часовой или против часовой стрелки;
составление уравнений равновесия для определения внутренних усилий;
решение уравнений равновесия, то есть определение внутренних усилий для рассматриваемого сечения.
Указанный алгоритм описывается аббревиатурой РОЗУ, сущность которой показана на рис 2.15.а. и 2.15.б..
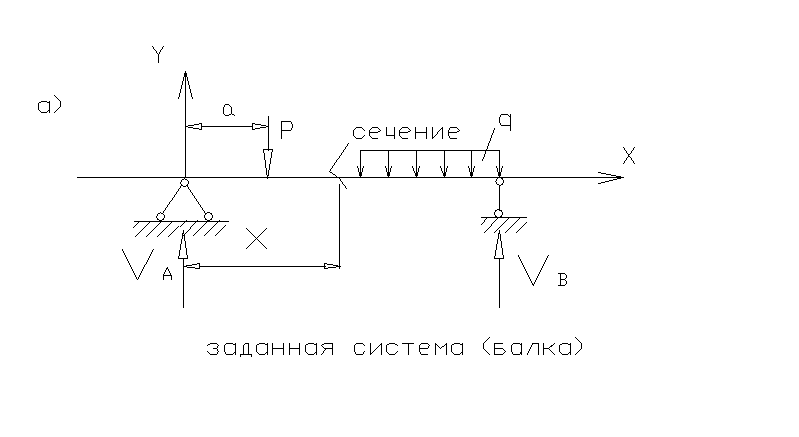
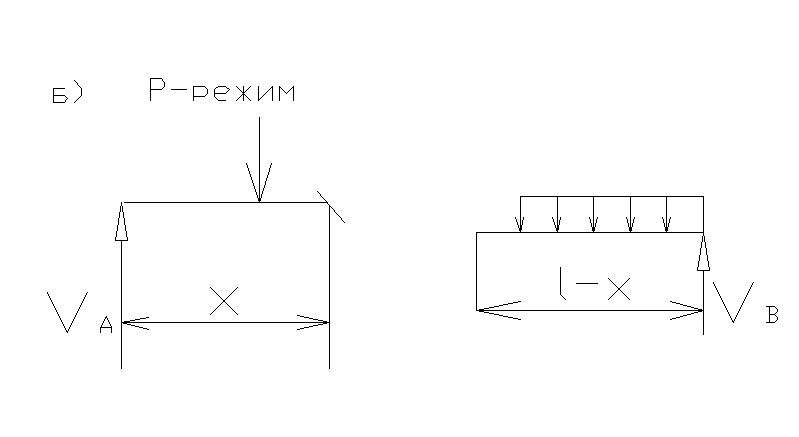
Рис.2.15.а


 д) У -
Записываем три уравнение равновесия
д) У -
Записываем три уравнение равновесия
![]() -
для определения N,
-
для определения N,
![]() -
для определения Q,
-
для определения Q,
![]() -
для определения М,
-
для определения М,
где о - точка в сечении.
Рис 2.15.б
Для рассматриваемой балки эти уравнения имеют следующий вид:
![]() ,
,
![]() ,
,
![]() .
.
Решая уравнения, находим
N=0,
Q=VA- P,
![]() .
.
2.2.3. Определение положения растянутого волокна.
Для определения положения растянутого волокна на рассматриваемом участке стержня предлагается следующий алгоритм:
Задать произвольное направление искомого изгибающего момента (рис.2.16).

Показать штриховой линией на рассматриваемом участке положение растянутого волокна , руководствуясь правилом:
Изгибающий момент действует от растянутого волокна.
Записать уравнение равновесия
![]()
и решить его.
Проанализировать полученный результат:
а) если ответ получен со знаком плюс, то это означает, что положение растянутого волокна предварительно определено правильно;
Б) если ответ получен со знаком минус, то это означает, что растянутое волокно расположено с обратной стороны по сравнению с предварительно принятым.
Отложить ординату М со стороны растянутого волокна.
Покажем применение алгоритма на конкретном примере.
Пример.
Требуется построить эпюру изгибающего момента для балки, показанной на рис.2.17.
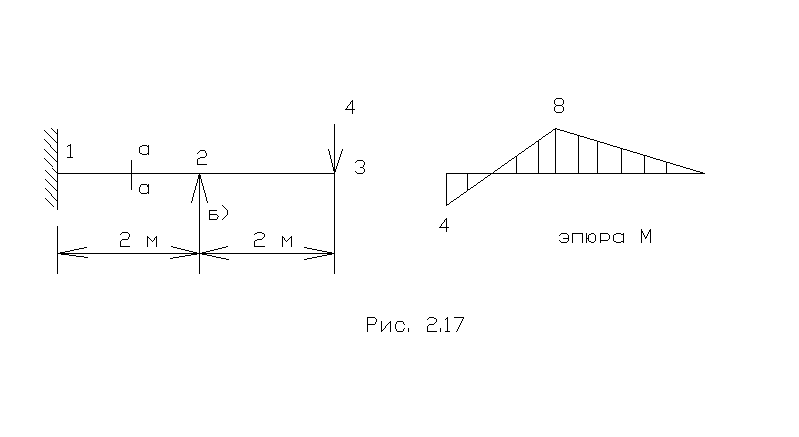
Рассматриваем участок 1-2.
Проводим сечение а-а, отбрасываем левую от сечения часть балки и рассматриваем равновесие её правой части (рис.2.18)
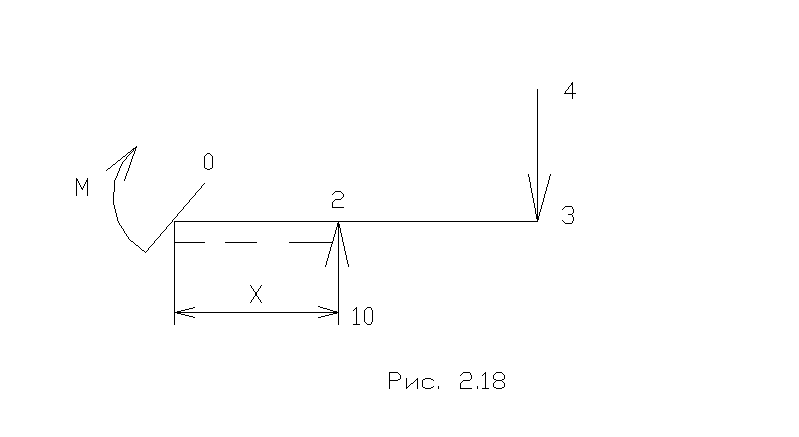
Изгибающий момент в сечении направляем по часовой стрелке. В этом случае мы предполагаем, что растянутое волокно на участке расположено снизу.
Записываем уравнение равновесия
![]()
и решаем его. В результате получаем
![]() .
.
В сечении 1 при х=2м
![]() кНм.
кНм.
В сечении 2 при х=0
![]() кНм.
кНм.
Анализируем результат расчета.
а) Так как в сечении 2 М1=4>0 , то растянутое волокно расположено снизу. Следовательно, ординату М, откладываем вниз.
б) Так как в сечении 2 М2=-8 <0, то растянутое волокно в этом сечении расположено сверху. Следовательно, ординату М2=8 откладываем вверх.
Рассматриваем аналогичным образом участок 2-3 и строим эпюру М.
Знаки на эпюре не ставим (рис.2.17)