

МОС Конспект Лекций
.pdfНавигационные параметры и их градиенты
Пеленг
Градиент направлен в сторону возрастания пеленга.
Модуль градиента
Направлен этот градиент от ориентира, т.е.
= П -90 .
Навигационные параметры и их градиенты
Высота светила
Модуль градиента gh = 1.
Направлен этот градиент к светилу, т.е.
= А.
А– азимут светила.
Чтобы выяснить последовательность действий при определении места судна обобщенным методом линий положения, раскроем в формуле сокращения:
φо и λо − обсервованные координаты судна,
φс и λс − счислимые координаты на момент обсервации,
Uо − измеренное значение навигационного параметра,
Uс − значение навигационного параметра в счислимой точке.

Последовательность действий при ОМС по ЛП
Измеряются, как минимум, два навигационных параметра.
В момент измерения фиксируется время и на этот момент, с карты снимаются счислимые координаты.
В навигационные функции подставляются счислимые координаты и рассчитываются счислимые навигационные параметры Uс1 и Uс2.
Рассчитываются или выбираются из справочной литературы модули и направления градиентов навигационных параметров g1, 1, g2, 2.
Рассчитываются переносы р1 и р2.
Аналитическое решение
cos 1 sin 1 p1cos 2 sin 2 p2
Система решается методом определителей:
D cos 1 sin 2 sin 1 cos 2,
D p1 sin 2 p2 sin 1, D p2 cos 1 p1 cos 2 ,
DD , DD ;
0 c ; 0 c .
Графическое решение
На карте в счислимой точке С проводятся направления 1 и 2 .
По этим направлениям откладываются переносы р1 и р2.
Таким образом получаются определяющие точки к1 и к2.
Через эти точки проводятся линии положения перпендикулярно к направлениям градиентов. Пересечение линий положения дает обсервованную точку , координаты которой снимаются с рамок карты.

Оценка точности места судна
Оценка точности обсервации по двум независимым ЛП
ЛП считаются независимыми,
если |
систематическая |
часть |
полной |
погрешности |
в |
|
% |
8 |
|
6 |
|
6 8 %
измеренных навигационных  1 параметрах пренебрежимо мала по сравнению со случайной частью.
1 параметрах пренебрежимо мала по сравнению со случайной частью.
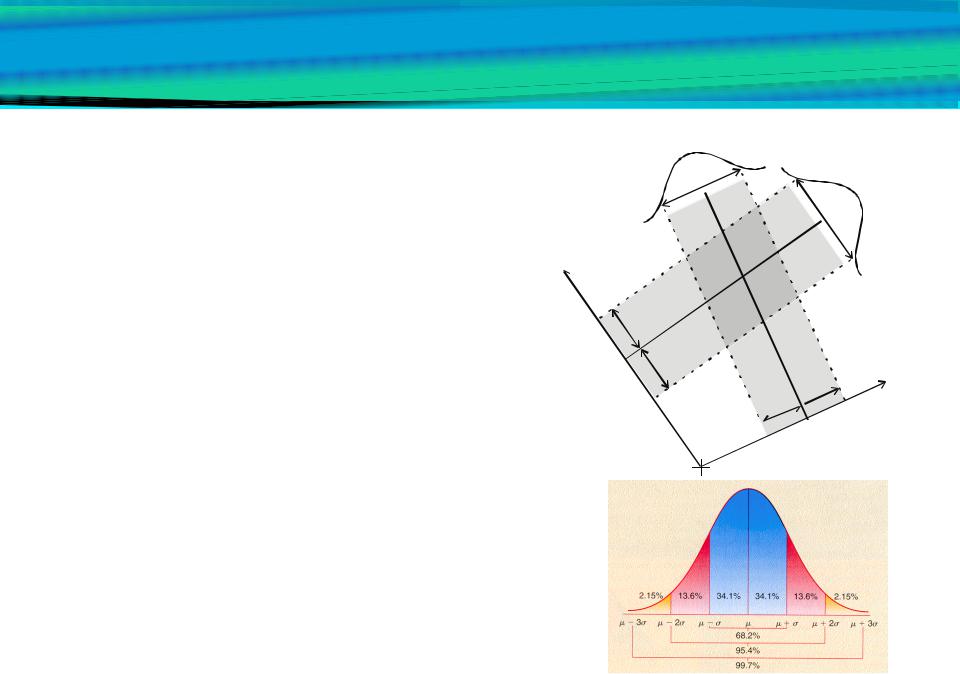
Полосой положения
называется область р ± mЛП. Можно утверждать, что с вероятностью 68% судно находится в этой полосе.
+ |
П |
1 |
|
||
m |
Л |
|
|
|
|
1 |
|
|
|
- |
k 1 |
m |
1 |
p1
 F
F
Л
П 2
m2 +  -m2
-m2 


 k 2 C p 2
k 2 C p 2
 2
2
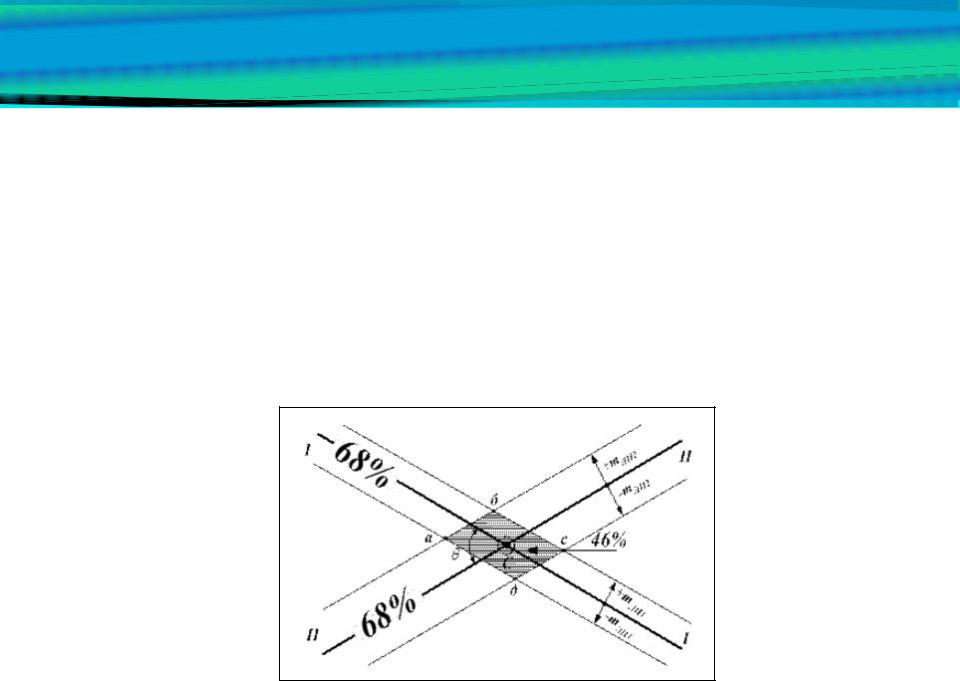
Пересечение полос положения образует четырехугольник, который называется фигурой погрешностей (figure of uncertainty).
Она показывает область, в которой с определенной вероятностью может находиться действительное место судна.
Вероятность того, что действительное место судна находится в указанном четырехугольнике, равна произведению вероятностей полос положения, т.е. 0,682 ≈ 0,46 = 46%.

Эллипс погрешностей
Уравнение эллипса с полуосями сmх и сmу.
|
х |
2 |
|
у |
|
2 |
|
|
|
|
|
1 |
|||
|
|
||||||
|
|
|
|
|
|
|
|
|
стх |
|
сту |
|
|||
Эллиптическая погрешность места (эллипс погрешностей) — эллипс соответствующих размеров и ориентировки (с центром в оцениваемом месте), в пределах которого с заданной вероятностью находится фактическое место судна.
Элементами эллипса погрешностей называются его полуоси a и b и угол φ, служащий для ориентировки эллипса.