

МОС Конспект Лекций
.pdfКроме своей основной функции − для определения
места судна, изолинии могут служить для ограждения
каких-либо опасностей или для задания нужного
направления.

Контрольная функция изолинии в поворотных точках
маршрута.
Обычно на картах в поворотных точках наносятся
контрольные изолинии пеленга или дистанции.

Определение места судна по изолиниям имеет существенные недостатки.
1. Графическое решение возможно только для простых изолиний − окружностей и прямых линий.
2. Аналитическое решение затруднено.
3. Кроме того, любые две изолинии (кроме прямых) дают более одной точки пересечения. Для устранения неоднозначности решения необходимо привлекать дополнительную информацию.

Обобщенный метод линий положения
Отрезки изолиний в окрестности счислимой точки заменяются касательными. Такая
касательная к изолинии вблизи счислимой точки называется линией положения (LOP).
Две прямые пересекаются в одной точке, что делает решение однозначным.

Уравнение линии положения в общем виде:
|
|
дU |
|
дU |
|
||
|
|
|
|
|
|
|
U |
|
|
|
|||||
|
|
д с |
|
д с |
|
||
где: |
U U o U c |
− разность значений навигационного |
|||||
параметра в обсервованной и счислимой точке,
с − разность широт между обсервованной и
|
счислимой |
точками, |
|
( с ) cos − отшествие между обсервованной и |
|
|
счислимой |
точками. |

Для двух навигационных параметров можно составить
систему двух уравнений линий положения:
|
дU |
|
дU |
|
|
||
|
|
|
|
|
|
U |
1 |
|
|
||||||
|
|
|
|
д с 1 |
|
||
|
д с 1 |
|
|
||||
|
дU |
|
|
|
|
|
||
|
|
|
|
д с 2 |
|
|
дU |
|
|
|
|
|
U 2 |
|
|||
|
д с 2 |
|
|
решается относительно Δφ и Δω.
Затем рассчитываются обсервованные координаты:
о с ; |
о |
с |
|
|
|
|
|||||
cos |
|||||
|
|
|
|
Градиент навигационного параметра
Смещение обозначим буквой р. Оно пропорционально
изменению навигационного параметра, |
а коэффициент |
||
пропорциональности |
|
называется |
|
g |
градиентом |
||
|
|
|
|
навигационного параметра:
U = g р. 
Отсюда выразим градиент: |
|
U |
|
|
|
||
|
|||
g |
|
||
p |
Градиентом навигационного параметра называется векторная величина, характеризующая скорость изменения навигационного параметра при перемещении по нормали к изолинии в сторону увеличения навигационного параметра.
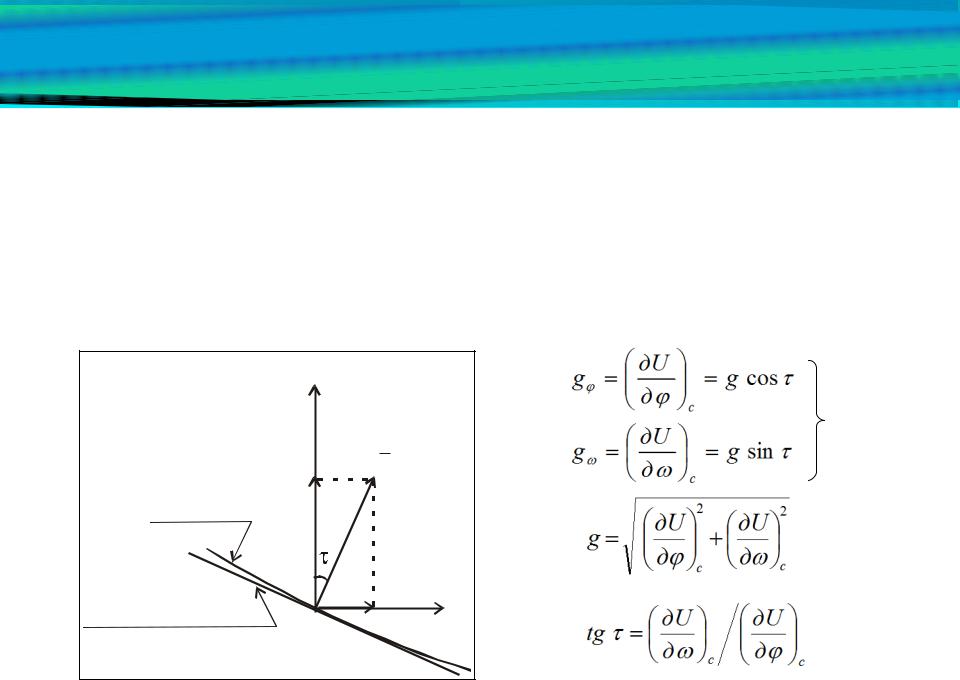
Как любая векторная величина, градиент
характеризуется модулем |
g и направлением τ. |
|
|
N |
|
g |
g |
|
|
|
|
Изолиния |
|
|
Линия положения |
g |
E |
|
|
|

ОМС обобщенным методом ЛП
Уравнение линии положения в частных производных:
|
дU |
|
дU |
|
||
|
|
|
|
|
|
U |
|
|
|||||
|
д с |
|
д с |
|
||
Выразим |
в нем частные производные через модуль |
градиента и его направление: |
|
|
Δφ g cos τ + Δω g sin τ = U. |
Заменив U |
по формуле U = g р и сократив обе части |
равенства на g , получим уравнение линии положения в нормальном виде:
Δφ cos τ + Δω sin τ = р
Перенос р и направление τ называются
элементами линии положения.
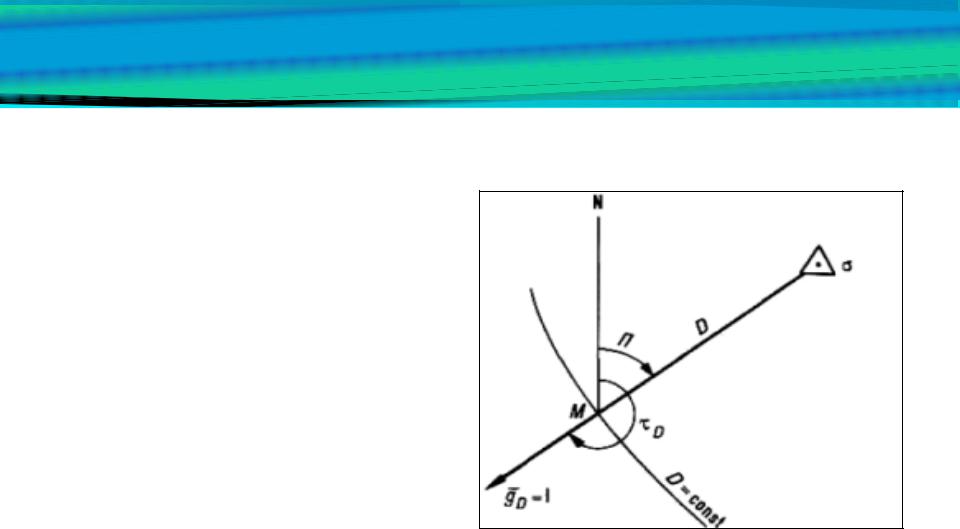
Навигационные параметры и их градиенты
Расстояние
Модуль градиента расстояния
gD = 1.
Направлен этот градиент от ориентира, т.е.
= П +180 .