

МОС Конспект Лекций
.pdfОбработка неравноточных наблюдений
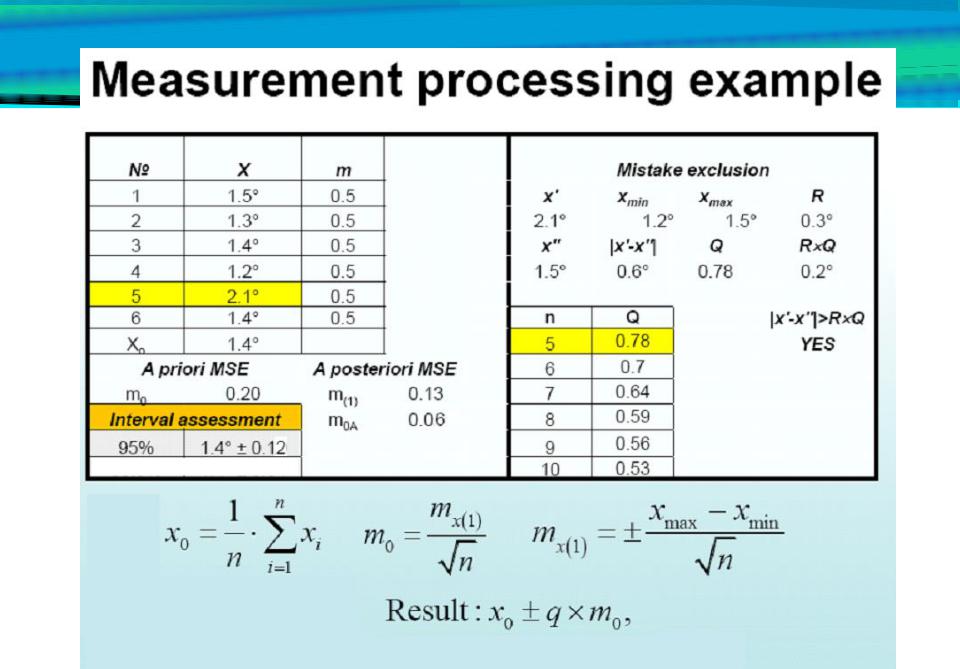
В качестве наиболее вероятного значения для серии неравноточных измерений принимают средневзвешенное:
n
xi pi
x0 1 n
pi
1
где xi – i-тое значение навигационного параметра; n – число измерений в серии.
Когда результаты измерений выражаются многозначными числами, средневзвешенное целесообразно вычислить по
формуле n
(xi xy ) pi
x0 xy |
1 |
|
|
n |
|
|
|
pi |
1
где – удобно выбранное число.
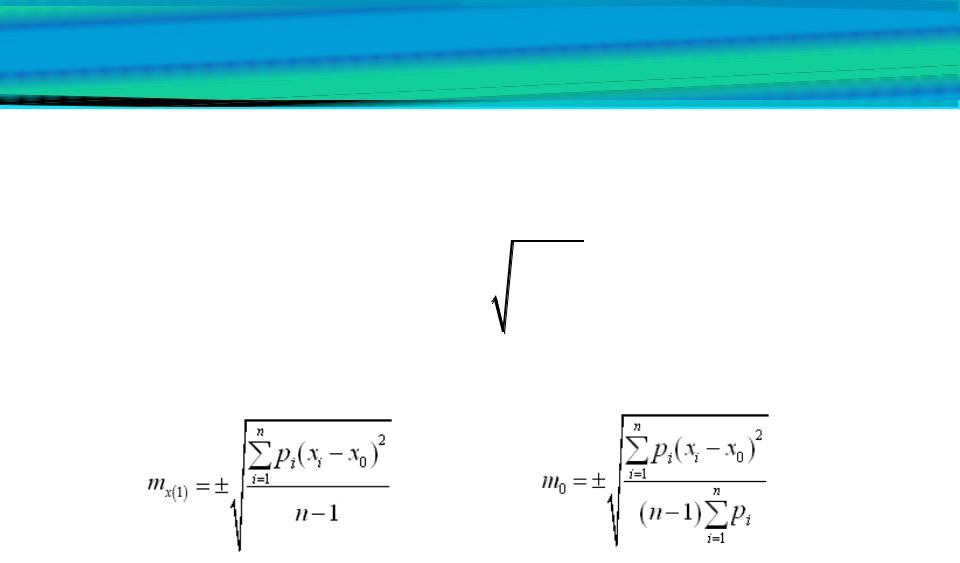
Точность средневзвешенного значения характеризуется его
СКП, которая определяется по формулам:
при априорном: |
|
|
1 |
|
m0 |
|
|
||
|
|
|
||
|
|
|
||
n |
|
|||
|
|
|
pi |
|
при апостериорном: |
|
|
i 1 |
|
|
|
|
|
где m0 – СКП средневзвешенного, mx(1) – СКП единичного измерения.
Теория определения места судна

Навигационные определения
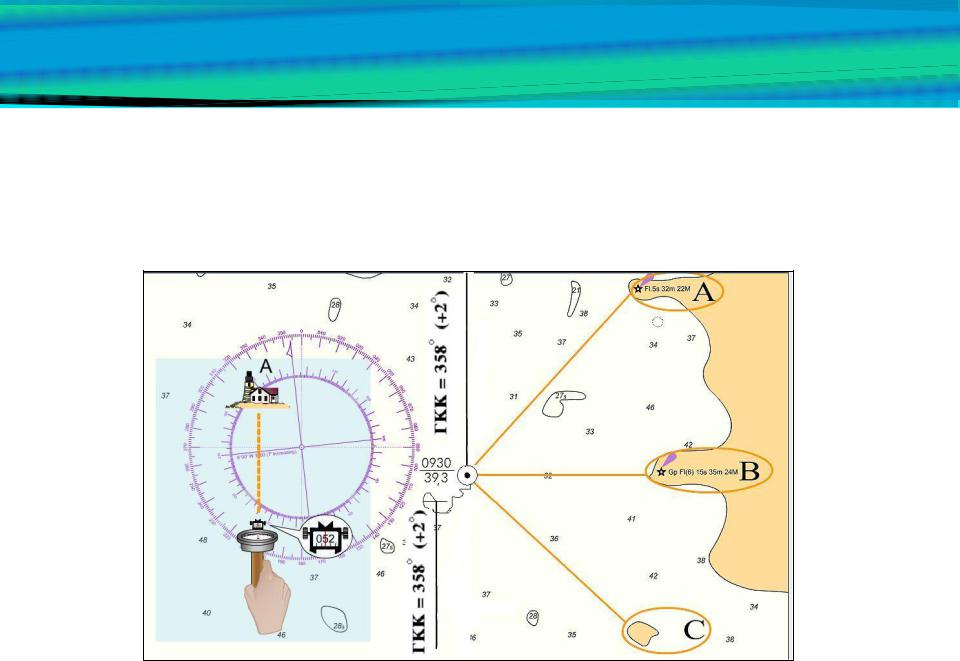
Истинный курс (Hdg) - горизонтальный угол между северной частью истинного меридиана и диаметральной плоскостью судна по направлению его движения, измеренный по ходу часовой стрелки от 0º - 360º.
Линия по которой фактически перемещается судно называется линией пути
(TMG).
Путевой угол (Track) – угол, между северной частью истинного меридиана и линией пути судна.
Истинный пеленг (Brg) - горизонтальный угол между северной частью истинного меридиана и направлением из точки наблюдения на объект, измеряемый по часовой стрелке от 0º - 360º.

Навигационные параметры и изолинии
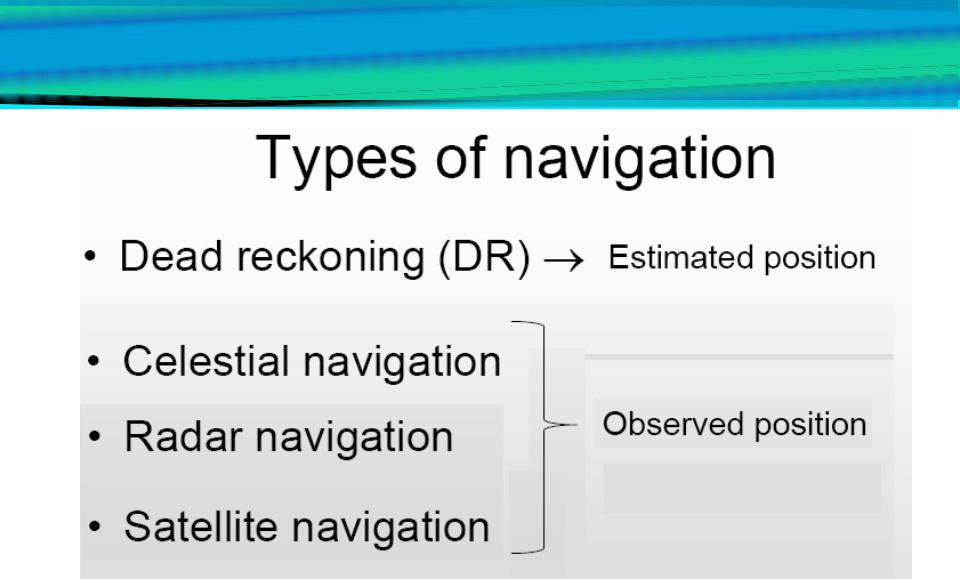
Счисление (Dead reckoning “DR”) – способ определения места судна по путевому углу и пройденному расстоянию на любой момент времени; место судна в таком случае называется счислимым.
Определение места судна по ориентирам называется
обсервацией (observed position “OP” or position fix), а
место, полученное таким образом − обсервованным.
Геометрические величины, связывающие координаты ориентиров с координатами точек на земной поверхности называют навигационными параметрами (NP).

Навигационная функция - аналитическая зависимость навигационного параметра от координат судна на земной поверхности.
U f ( , )
где U − значение параметра; φ и λ − координаты судна.
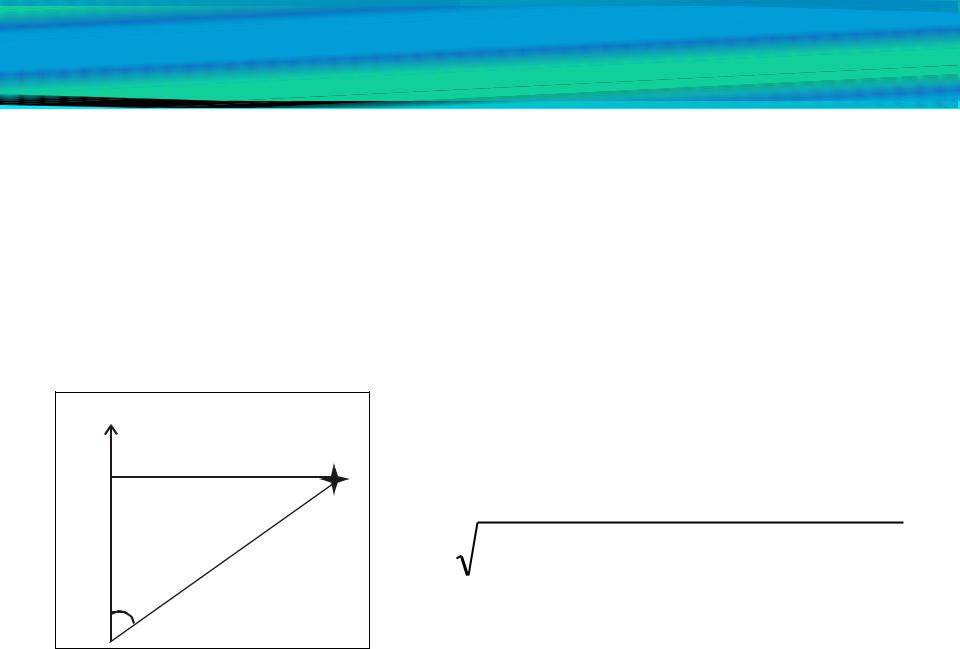
|
Дистанция на плоскости |
|
|
|
|
|||||
Ориентир А |
и |
судно |
F. Дистанция |
|
D |
определяется |
по |
|||
теореме Пифагора, где катеты - разность широт (РШ) и |
||||||||||
отшествие (ОТШ). |
|
|
|
|
|
|
|
|
||
Отшествие (Departure) - расстояние между меридианами |
||||||||||
начального и конечного пунктов плавания, считаемая по |
||||||||||
средней параллели и выражаемая в мор. милях. |
|
|
|
|
||||||
N |
|
|
РШ = φ – φа |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
ОТШ |
|
A |
ОТШ = (λ – λа)· cos φср |
|
|
|
|
|||
B |
|
|
|
|
|
|
||||
РШ |
|
|
D ( a ) |
2 |
( a ) |
2 |
cos |
2 |
cp |
|
D |
|
|
|
|
||||||
|
|
|
|
|
||||||
П |
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
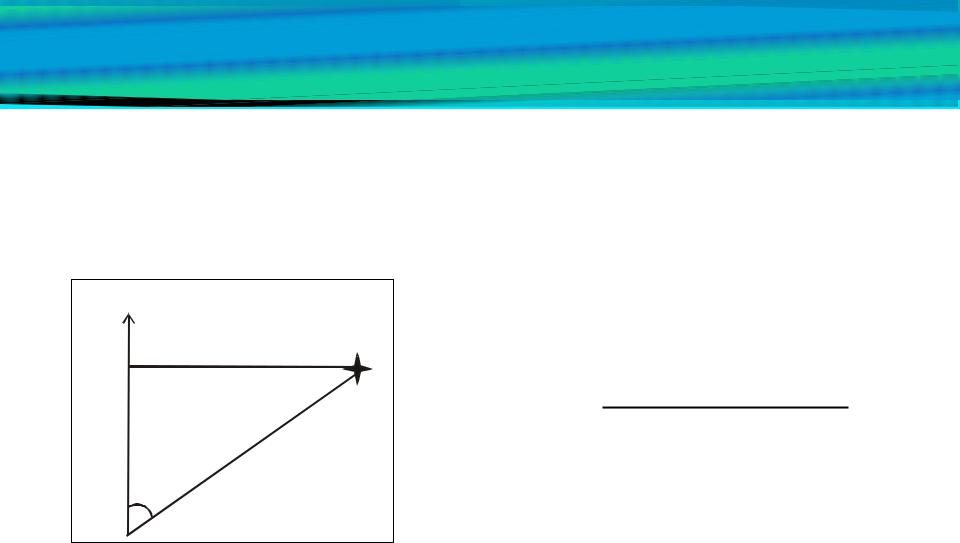
Пеленг на плоскости
Ориентир А и судно F. Пеленг П определяется из ABF.
N |
|
ОТШ |
A |
B |
|
РШ |
D |
|
|
П |
|
F |
|
Пarc tg ( a ) cos cp
a