

4.2.Пример составления структурной схемы системы
В качестве примера рассмотрим составление структурной схемы двигателя постоянного тока независимого возбуждения, как объекта регулирования. Электрическая схема двигателя представлена на рис. 4.3.

Представим основные уравнения для двигателя независимого возбуждения, полагая, что магнитный поток двигателя Ф=const.
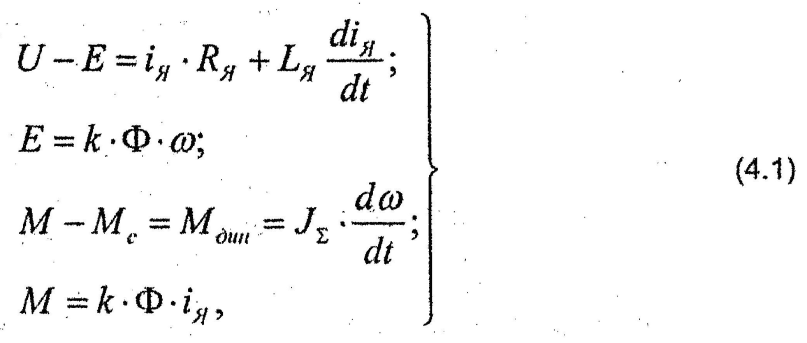
где U,E - соответственно напряжение и ЭДС двигателя;
iя, М - ток якоря и момент двигателя;
Rя, Lя - активное сопротивление и индуктивность обмотки якоря двигателя;
Uв,Iв- напряжение и ток возбуждения двигателя.
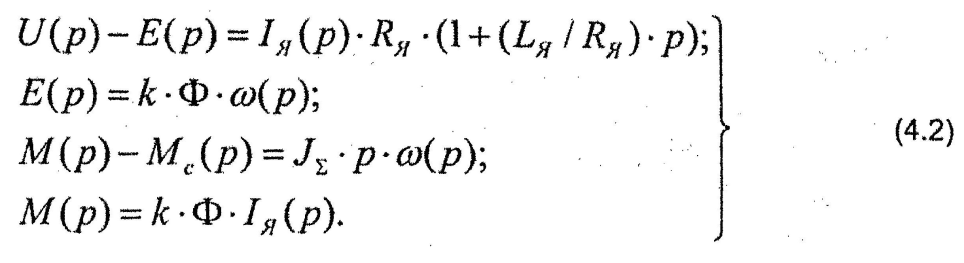
Запишем уравнения (4.1) в операторном виде.
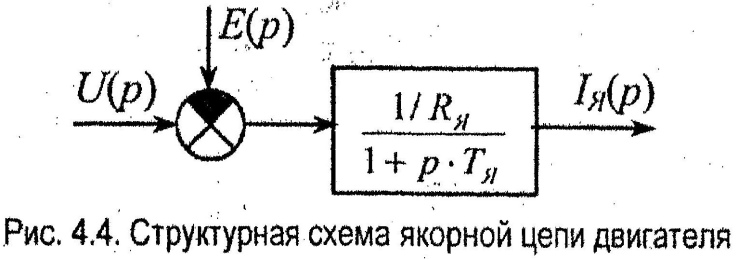
Для якорной цепи как динамического звена можно получить следующую передаточную функцию, позволяющую получить структурную схему звена (рис. 4.4):

где TЯ=LЯ/RЯ - электромагнитная постоянная времени двигателя.
Аналогично можно представить структурные схемы других звеньев по их передаточным функциям
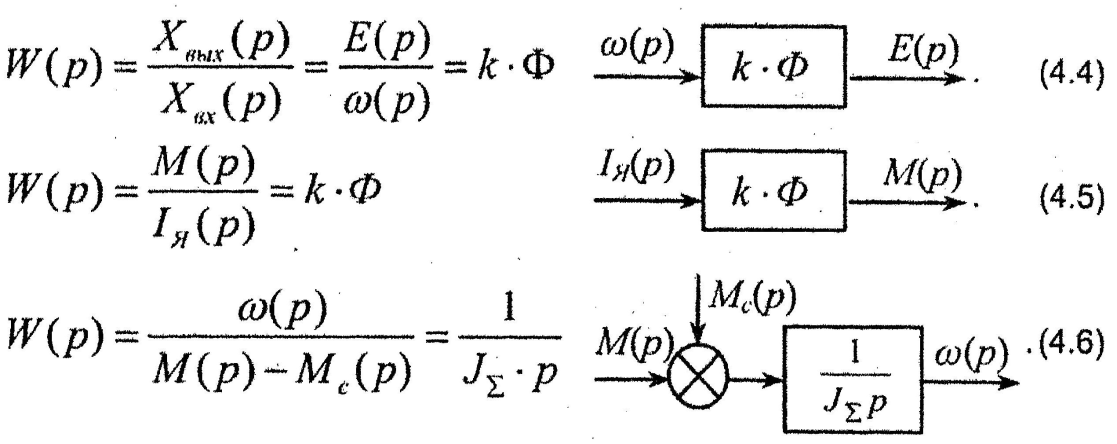
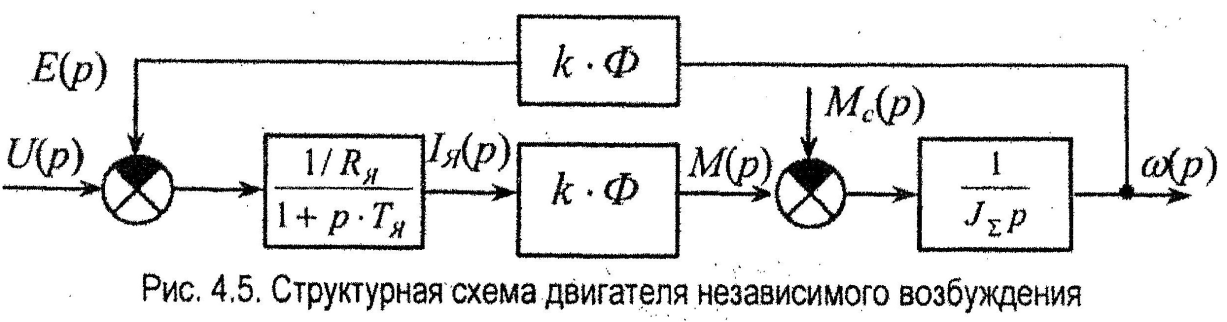
По структурным схемам отдельных звеньев может быть получена полная структурная схема двигателя независимого возбуждения как объекта регулирования (рис. 4.5).
4.3. Получение передаточной функции разомкнутой системы по передаточным функциям звеньев
Дифференциальное уравнение всей системы может быть получено из уравнений отдельных звеньев, если исключить из них обычным порядком все промежуточные переменные и оставить только входное воздействие и выходную переменную. Но значительно более просто можно получить описание системы, если оперировать передаточными функциями звеньев. Различают следующие способы соединения звеньев:
1) последовательное, при котором выходная величина предыдущего звена является входной для последующего звена;
2) параллельное, при котором на вход нескольких звеньев подается одна и та же величина, а выходная величина представляет собой сумму выходных величин этих звеньев;
3) замыкание системы или нескольких звеньев обратной связью, когда на вход замыкаемых звеньев с их выхода подается сигнал через замыкающие звенья, находящиеся в цепи обратной связи.
4.3.1.Передаточная функция цепи последовательно соединенных звеньев направленного действия
Предположим, что система состоит из n-последовательно включенных звеньев. В этом случаи можно записать следующую систему уравнений для них:
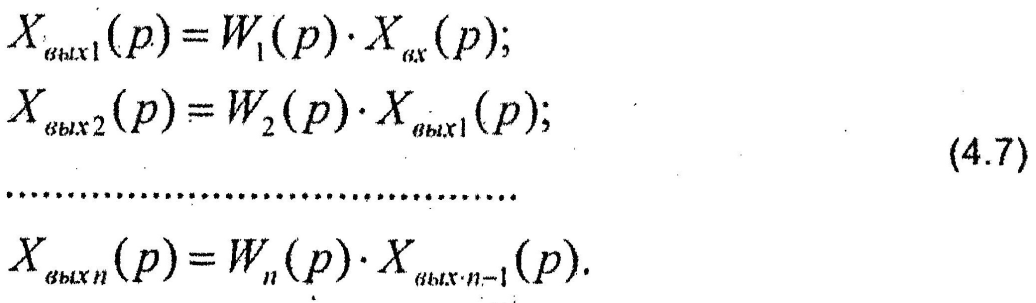
Из уравнений следует, что выходная величина первого звена является входной величиной второго звена и т.д.
Для того, чтобы выразить зависимость между выходной величиной системы Хвых и входной величиной Хвх нужно исключить все промежуточные переменные Хвых1, Хвых2 и т.д. Для этого первое уравнение нужно подставить во второе, затем полученное уравнение подставить в третье и т.д.
После исключения промежуточных переменных получим:
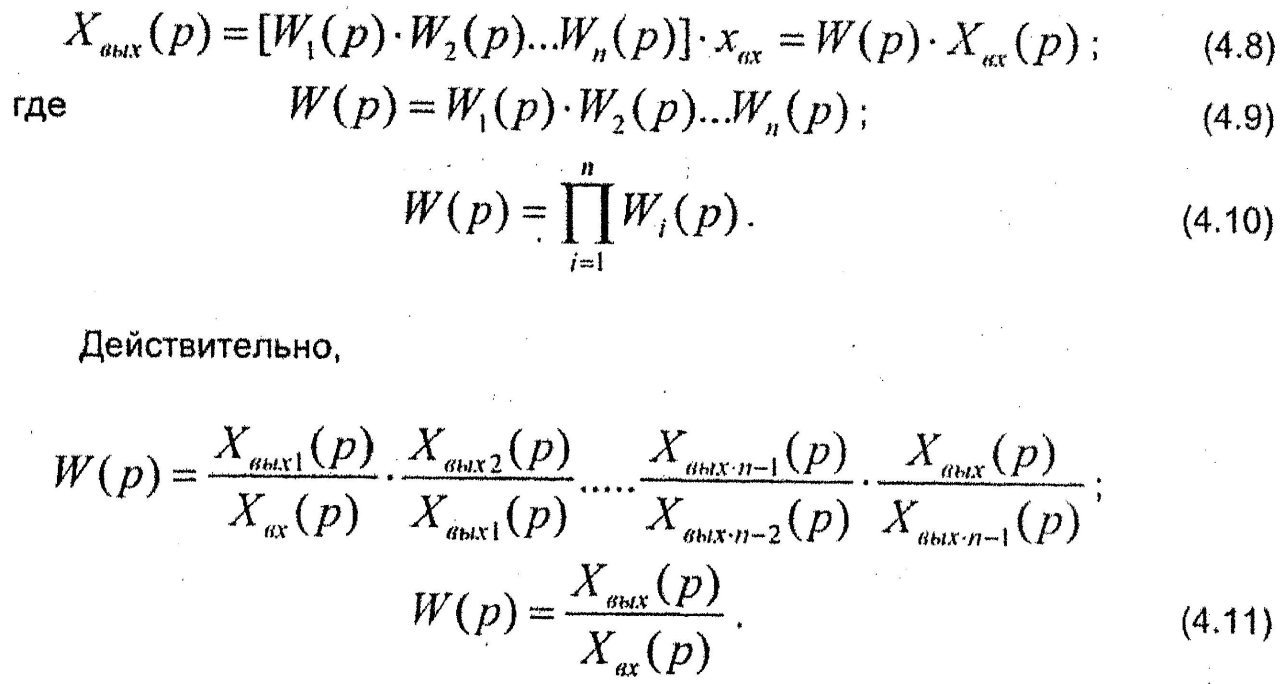
Следовательно, передаточная функция цепи последовательно соединенных звеньев равна произведению передаточных функций звеньев. Отсюда следует, что такую цепь можно заменить в структурной схеме одним эквивалентным звеном с передаточной функцией W(p).