

Теоретическая механика (фундаментальные законы механики). Учебное пособие
.pdf342 |
Глава 10. Принцип возможных перемещений |
|
|
случае. Поэтому ни о каком сведении задачи динамики к задаче статики в общем случае не может быть и речи. В-третьих, любопытно, как бы отнесся сам Даламбер к подобной трактовке его принципа? Ведь Даламбер всю жизнь стремился изгнать силы из механики. В оригинальной трактовке принципа Даламбера [15] никакие силы вообще не упоминаются. Речь идет только о движениях разного рода. Поэтому введение еще одного разряда сил, вместо их изгнания, видимо, сильно рассердило бы Даламбера. Здесь не место обсуждать истинный принцип Даламбера. Заметим только, что в рациональной механике нет нужды ни в современной, ни в оригинальной версиях принципа Даламбера. Поэтому в данной книге он не используется.
10.3.Общий принцип возможных перемещений
Рассмотрим принцип возможных перемещений с точки зрения фундаментальных законов механики. Как уже отмечалось, прямым предшественником принципа возможных перемещений являлось так называемое Золотое правило механики: выигрывая в силе, проигрываешь в пути. Например, нам нужно поднять сто кирпичей весом один килограмм каждый на высоту один метр. Это можно сделать разными способами. Можно сразу поднимать все кирпичи и совершить работу 100 кг· м. Здесь нужна большая сила, зато путь оказывается коротким: всего 1 м. Можно поднимать по одному кирпичу. Сила требуется небольшая, зато суммарный путь оказывается наибольшим: 100 м. Совершаемая при этом работа оказывается одинаковой. Именно это равенство или баланс совершаемых работ и утверждается Золотым правилом механики. Хотя можно привести бесчисленное число примеров реализации Золотого правила механики, его совсем непросто выразить в общих терминах рациональной механики. Это и понятно, ибо фактически Золотое правило механики тесно связано с понятием энергии, которое формировалось очень трудно и только еще обретает, но не обрело, каноническую форму в рациональной науке. Поэтому совсем не случайно первая общая формулировка принципа возможных перемещений, выражающего Золотое правило механики, была дана И. Бернулли только после того, как сформировались, хотя и не вполне отчетливые, представления о кинетической энергии и ее связи с уравнениями движения, а также о силах и работе. На интуитивном уровне И. Бернулли осознал, что работа сил, действующих на систему, идет на изменение кинетической энергии этой системы. Если же ограничиться статикой, то эта работа должна равняться нулю. При этом под силами, действующими посредственно, И. Бернулли, видимо, имел в виду внутренние силы в системе, а под силами, действующими непосредственно, он понимал внешние силы. После того, как Л. Эйлер
10.3. Общий принцип возможных перемещений |
343 |
|
|
дал окончательную математическую форму (1747, 1750) первого закона динамики (второго закона Ньютона), стало возможным установление ясной связи между уравнениями движения и кинетической энергией. В настоящее время упомянутая связь называется Теоремой об изменении кинетической энергии, из которой и вытекает принцип возможных перемещений. Причем более ясное выражение принцип возможных перемещений получает, если его выразить в терминах энергии. А именно, общее уравнение динамики или принцип возможных перемещений являются просто частными формами уравнения баланса энергии (9.3.1), которое можно переписать в виде
n
X
dK(A) + dU(A) = [F (Ak, Ae) · dRk + L (Ak, Ae) · ωkdt] + δ(A, Ae)dt.
k=1
(10.3.1) Здесь использовано выражение для мощности внешних воздействий (6.3.2), когда система состоит не из материальных точек, а из односпиновых частиц, в качестве которых могут выступать и абсолютно твердые тела. Если считать изменения в системе медленными настолько, что кинетической энергией можно пренебречь, то из (10.3.1) следует принцип возможных перемещений в его
современной форме
n
X
dU(A) = [F (Ak, Ae) · dRk + L (Ak, Ae) · ωkdt] + δ(A, Ae)dt. (10.3.2)
k=1
Следует предостеречь от излишне широкой трактовки принципа возможных перемещений в форме (10.3.2). Допущение о том, что изменения в системе происходят сколь угодно медленно, не является достаточно общим. Для многих механических систем характерны скачкообразные изменения ее состояния при сколь угодно медленных изменениях внешних воздействий. Таковыми являются системы с фазовыми переходами и неустойчивыми положениями равновесия, когда переход от неустойчивого положения равновесия к устойчивому положению равновесия осуществляется только динамическим путем, причем скорость такого перехода определяется свойствами самой системы, а не внешними воздействиями. Только в относительно простых случаях, которые, разумеется, часто встречаются в приложениях, применение принципа (10.3.2) допустимо. В противоположность сказанному, уравнение баланса энергии (10.3.1) применимо всегда.
Обратимся к сравнительному обсуждению принципа Лагранжа (10.2.10) и принципа возможных перемещений (10.3.2). Во-первых, принцип возможных перемещений (10.3.2), в отличие от принципа Лагранжа, не является следствием первых двух законов динамики, а представляет собой независимое утверждение механики. Это различие пропадает, если подвод энергии от внешних

10.4. Модифицированный рычаг Архимеда |
345 |
||||
|
O |
|
O |
|
|
A F |
B |
A F |
|
B |
|
|
O1 |
|
O1 |
|
|
C |
D |
C |
c |
D |
|
|
|
||||
|
O2 |
|
|
|
|
|
|
O2 |
|
|
|
|
|
|
|
|
|
E |
H |
E |
|
H |
|
|
|
|
|
||
|
O3 |
|
O3 |
|
|
|
|
|
|
|
|
a) |
P |
b) |
P |
|
|
|
|
|
|||
|
|
|
|
|
|
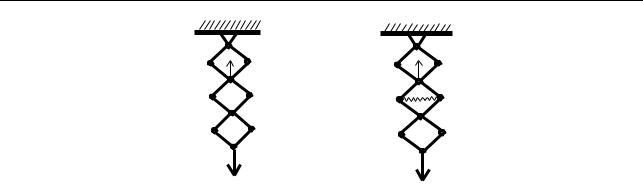
Рис. 10.1. Модифицированный рычаг Архимеда
двигаться так, что пружина остается недеформированной, то при устремлении жесткости пружины к бесконечности, система будет двигаться так, что пружина будет оставаться недеформированной. Тем не менее, сила упругости в пружине будет оставаться отличной от нуля, но конечной. Как это может быть? По равенству (10.3.4) видим, что
c → ∞, |Fe| < ∞ → 0.
Отсюда и по равенству (10.3.3) видим, что внутренняя энергия пружины при устремлении ее жесткости к бесконечности стремится к постоянной величине
U = |
1 |
lim c |
2 + const = − |
1 |
lim Fe + const = const. |
|
2 |
2 |
|||||
|
→ 0 |
|
→ 0 |
Поэтому эта внутренняя энергия не влияет на уравнение баланса энергии (10.3.2). Поскольку все идеальные связи осуществляются исключительно недеформируемыми телами, то учет такого рода связей осуществляется утверждением о постоянстве их внутренней энергии. Вполне аналогично вышесказанному можно убедиться, что внутренняя энергия абсолютно твердого стержня постоянна. Причем это верно, независимо от того, передает ли стержень только продольную силу (идеальная связь), или он передает и поперечную силу (неидеальная связь).
Резюме: Принцип возможных перемещений в его современной формулировке (10.3.2) во всех случаях проще, надежнее и сильнее, нежели принцип Лагранжа, выражаемый равенством (10.2.10).
10.4.Модифицированный рычаг Архимеда
Вкачестве простой иллюстрации принципа возможных перемещений рассмотрим задачу, приведенную в учебнике [41], с. 114. На рис. 10.1,a изображен механизм, состоящий из восьми абсолютно твердых стержней:

10.4. Модифицированный рычаг Архимеда |
347 |
|
|
тела, а пружина отнесена к окружению. Поэтому внутренняя энергия системы постоянна. Кроме того, система может совершать только вертикальные движения. Таким образом, имеем
dU(A) = 0, Fe = F k, dR1 = −δs k, P = −P k, dR2 = −3δs k.
После учета этих соотношений в равенстве (10.4.2) приходим к равенству (10.4.1). Рассматриваемую задачу можно решить и другим способом. Включим пружину в состав рассматриваемой системы. Тогда ее внутренняя энергия с точностью до постоянной величины равна внутренней энергии пружины
U(A) = |
1 |
c |
2 |
dU(A) = c ΔdΔ, |
(10.4.3) |
|
|||||
2 |
|
||||
где c есть жесткость пружины, а |
|
есть удлинение пружины. |
|
||
Внешние силы, действующие на систему, сводятся к двум силам: силе P и реакции в шарнире O. Причем последняя сила не совершает работы, поскольку шарнир O неподвижен. Таким образом принцип возможных перемещений
сводится к равенству |
|
|
|
c ΔdΔ = 3 P dΔ |
|
c = 3 P. |
|
Поскольку по закону Гука c = F |
, то |
|
|
|
вновь приходим к найденному ранее |
||
решению.
Немного усложним задачу и рассмотрим систему, расширенную включением дополнительной горизонтальной пружины и изображенную на рис. 10.1,b.
Применение принципа Лагранжа здесь затруднено необходимостью включать в список активных сил дополнительные внутренние силы, вызванные наличием горизонтальной пружины.
Применение принципа возможных перемещений в форме (10.3.2) остается по существу без изменений. Просто нужно учесть внутреннюю энергию дополнительной пружины. В результате имеем
U(A) = |
1 |
c |
2 + |
1 |
c 2 |
dU(A) = c ΔdΔ + c dΔ , |
|
|
|
|
|||||
2 |
2 |
||||||
где есть удлинение горизонтальной пружины.
Примем, что при отсутствии внешней силы пружины находятся в недеформированном состоянии. Пусть 2h и 2a есть длины нерастянутых вертикальной и горизонтальной пружин соответственно. Причем a2 + h2 = l2. Тогда для возможных удлинений пружин выполняется тождество
4a + 2 + 4h + 2 = 0 (4a + ) d + (4h + ) d = 0.

348 Глава 10. Принцип возможных перемещений
Если жесткость пружин достаточно велика, то эти равенства можно линеаризовать. В результате получим
a + h = 0 a d + h d = 0, dU(A) = c 1 + h2/a2 Δd .
По принципу возможных перемещений для силы натяжения вертикальной пружины получаем равенство
3 P
c = 1 + h2/a2 .
Как и следовало ожидать, сила натяжения в вертикальной пружине уменьшилась, поскольку часть нагрузки взяла на себя горизонтальная пружина.
Библиографический список
[1]Аппель П. Теоретическая механика. Т. 1. М.: ГИФМЛ, 1960. 515 с.
[2]Аппель П. Теоретическая механика. Т. 2. М.: ГИФМЛ, 1960. 487 с.
[3]Арнольд В.И. Математические методы классической механики. М.: Наука, 1979. 431с.
[4]Архангельский Ю.А. Аналитическая динамика твердого тела. М.: Наука, 1977. 328 с.
[5]Бернулли И. Избранные сочинения по механике. М.–Л.: ОНТИ, 1937. 297 с.
[6]Боль П. О некоторых дифференциальных уравнениях общего характера, применимых в механике: Собр. тр. /Под ред. Л.Э.Рейзиня. Рига: Зинатне, 1974. С. 73 — 198.
[7]Галилео Галилей. Беседы и математические доказательства, касающиеся двух новых отраслей науки. Галилео Галилей: Избр. тр. Т. 2. М.: Наука, 1964. 571 с.
[8]Галилео Галилей. Послание к Инголи. Галилео Галилей: Избр. тр. Т. 1. М.: Наука, 1964. 640 с.
[9]Гантмахер Ф.Р. Лекции по аналитической механике. М.: ГИФМЛ, 1960. 296 с.
[10]Гельмгольц Г. О сохранении силы. М.– Л.: ГИТТЛ, 1934. 143 с.
[11]Герц Г. Принципы механики, изложенные в новой связи. М.: Изд-во АН СССР, 1959. 386 с.
[12]Годунов С.К. Элементы механики сплошной среды. М.: Наука, 1978. 303 с.
[13]Голдстейн Г. Классическая механика. М.: Наука, 1975. 415 с.
[14]Григорьев В., Мякишев Г. Силы в природе. М.: Наука, 1973. 415 с.
[15]Даламбер Ж. Динамика. М.–Л.: ГИТТЛ, 1950. 343 с.
350 |
Библиографический список |
|
|
[16]Жилин П.А. Основные уравнения неклассической теории оболочек // Динамика и прочность машин: Тр. ЛПИ. № 386. СПб., 1982. С. 29–46.
[17]Жилин П.А. Тензор поворота в описании кинематики твердого тела // Механика и процессы управления: Тр. СПбГТУ. № 443. СПб. 1992. С. 100– 121.
[18]Жилин П.А. Векторы и тензоры второго ранга в трехмерном пространстве. СПб.: Нестор, 2001. 275 с.
[19]Жилин П.А. Принцип относительности Галилея и уравнения Максвелла // Механика и процессы управления: Тр. СПбГТУ. № 448. СПб.: Изд-во СПбГТУ, 1994. С. 3–38.
[20]Жилин П.А. Исходные понятия и фундаментальные законы рациональной механики // Тр. XXII школы–семинара "Анализ и синтез нелинейных механических колебательных систем". СПб., 1996. С. 14–40.
[21]Жилин П.А. Теоретическая механика: Учеб. пособие. СПб.: Изд-во СПбГТУ, 2001. 145 с.
[22]Журавлев В.Ф. Основы теоретической механики. М.: Наука, 1997. 320 с.
[23]Ишлинский А.Ю. Классическая механика и силы инерции. М.: Наука, 1987. 319 с.
[24]Киттель Ч., Найт В., Рудерман М. Механика. Берклеевский курс физики. Т. 1. М.: Наука, 1983. 447 с.
[25]Коддингтон Э.А., Левинсон Н. Теория обыкновенных дифференциальных уравнений. М.: ИЛ, 1958. 474 с.
[26]Крутков Ю.А. Об одной нерешенной задаче Эйлеровой Theoriae motus. Леонард Эйлер: Сб. статей и материалов к 150-летию со дня смерти. М.–Л.: Изд-во АН СССР, 1935. 239 с.
[27]Куликов К.А. Вращение Земли. М.: Недра, 1985. 159 с.
[28]Курант Р. Уравнения с частными производными. М.: Мир, 1982. 830 с.
[29]Кухлинг Х. Справочник по физике. М.: Мир, 1964. 519 с.
[30]Лагранж Ж–Л. Аналитическая механика. Т. I. М.–Л.: ОНТИ, 1938. 348 с.
[31]Ламб Г. Теоретическая механика Т. III. М.–Л.: ОНТИ, 1936. 291 с.
[32]Ланцош К. Вариационные принципы механики. М.: Мир, 1965. 408 с.
Библиографический список |
351 |
|
|
[33]Леонтович М.А. Введение в термодинамику. Статистическая физика. М.: Наука, 1983. 416 с.
[34]Лич Дж. У. Классическая механика. М.: ИЛ, 1961. 173 с.
[35]Лойцянский Л.Г., Лурье А.И. Курс теоретической механики. Т. 1. М.: Наука, 1982. 352 с.
[36]Лойцянский Л.Г., Лурье А.И. Курс теоретической механики. Т. 2. М.: Наука, 1983. 540 с.
[37]Лурье А.И. Аналитическая механика. М.: ГИФМЛ, 1961. 824 с.
[38]Лурье А.И. Нелинейная теория упругости. М.: Наука, 1980. 512 с.
[39]Магнус К. Гироскоп. Теория и применение. М.: Мир, 1974. 525 с.
[40]Мак-Миллан В.Д. Динамика твердого тела. М.: ИЛ, 1951. 467 с.
[41]Маркеев А.П. Теоретическая механика. М.: Наука, 1990. 414 с.
[42]Матвеев А.Н. Атомная физика. М.: Высш. шк., 1989. 439 с.
[43]Мах Э. Механика (историко–критический очерк ее развития). СПб.: Общественная польза, 1909. 448 с.
[44]Меркин Д.Р. Краткая история классической механики. М.: Физматлит, 1994. 159 с.
[45]Михайлов Г.К. Леонард Эйлер и его вклад в развитие рациональной механики // Успехи механики. Advances in mechanics. Warszawa. Polska. 1985. Vol. 8. № 1. P. 3–58.
[46]Най Дж. Физические свойства кристаллов. М.: Мир, 1967. 385 с.
[47]Никольский С.М. Курс математического анализа. Т. 1. М.: Наука, 1983. 448 с.
[48]Никольский С.М. Курс математического анализа. Т. 2. М.: Наука, 1983. 464 с.
[49]Норден А.П. Теория поверхностей. М.: ГИТТЛ, 1956. 259 с.
[50]Ньютон И. Математические начала натуральной философии. Собр. тр. акад. А.Н. Крылова. Т. VII. М.–Л.: Изд-во АН СССР, 1936.
[51]Ньютон И. Оптика. М.–Л.: ГИТТЛ, 1954. 367 с.