

4.2. Простейшие движения твердого тела
4.2.1. Поступательное движение твердого тела
Поступательным движением твердого тела называется такое движение, при котором любая, прямая, проведенная в теле, остается во все время движения параллельной своему первоначальному положению.
Рис. 4.2. |
Пусть твердое
тело движется поступательно относительно
системы координат
|
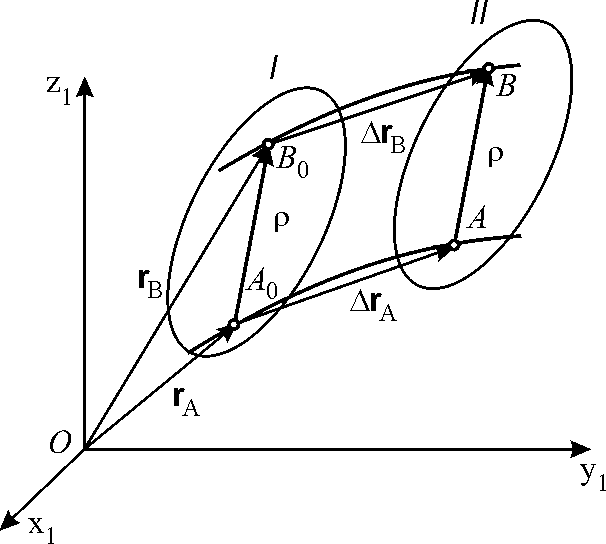
Так как рассматриваемое тело абсолютно твердое и его движение поступательное, то вектор при движении тела не меняет модуля и направления.
Из рассмотрения рис. 4.2 следует
![]() . (4.3)
. (4.3)
Пусть в момент
времени
тело занимало положение
![]() ,
а в момент времени
– положение
,
а в момент времени
– положение
![]() (рис. 4.2). Тогда
(рис. 4.2). Тогда
![]() будет вектором перемещения точки
А, а
будет вектором перемещения точки
А, а
![]() – вектором
перемещения точки В за промежуток
времени
.
– вектором
перемещения точки В за промежуток
времени
.
Во время движения вектор не изменяется, значит, отрезки А0В0 и АВ равны и параллельны и, следовательно, фигура А0В0ВА — параллелограмм.
Таким образом,
![]() ,
,
т.е. при поступательном движении абсолютно твердого тела перемещения всех его точек геометрически равны между собой.
Из равенства (4.3) и условия постоянства вектора также следует, что траектории точек тела, движущегося поступательно, одинаковы и получаются друг из друга параллельным смешением.
Продифференцировав выражение (4.3) по времени, получим
![]() ,
,
но так как
![]() ,
то
,
то
![]() и, следовательно,
и, следовательно,
![]()
или ![]() .
.
Дифференцируя полученное соотношение по времени, получим
![]()
или ![]() ,
,
т.е. при поступательном движении твердого тела скорости и ускорения всех его точек в каждый момент времени равны между собой.
Таким образом, при поступательном движении твердого тела все его точки движутся одинаково, так как их перемещения, скорости и ускорения геометрически равны. Следовательно, поступательное движение твердого тела определяется движением одной точки этого тела, координаты которой должны быть заданы как функции времени, т.е.
![]() ,
, ![]() ,
, ![]() .
.
Пользуясь понятием поступательного движения, докажем теорему о сложении скоростей точки, совершающей сложное движение.
Предположим, что точка М движется по отношению к системе координат Axyz, которая жестко связана с телом, перемещающимся поступательно по отношению к неподвижной системе координат Ox1y1z1.
Рис. 4.3. |
Положение точки относительно неподвижной системы координат определяется радиусом-вектором (рис. 4.3)
где |

Дифференцируя это равенство по времени, получим
![]() .
.
В этом равенстве
![]() есть скорость точки относительно
неподвижной системы координат, которая
называется скоростью точки в сложном
движении или абсолютной
скоростью и обозначается через
есть скорость точки относительно
неподвижной системы координат, которая
называется скоростью точки в сложном
движении или абсолютной
скоростью и обозначается через
![]() .
.
Первое слагаемое
в правой части равенства
![]() – скорость
точки А. Так как система координат
Ахуz движется
поступательно, то это одновременно
будет скоростью той точки тела, с которой
в данный момент совпадает движущаяся
точка М. Эта скорость называется
переносной скоростью точки
М и обозначается
– скорость
точки А. Так как система координат
Ахуz движется
поступательно, то это одновременно
будет скоростью той точки тела, с которой
в данный момент совпадает движущаяся
точка М. Эта скорость называется
переносной скоростью точки
М и обозначается
![]() .
.
Вектор
![]() определен в подвижной системе координат,
следовательно,
определен в подвижной системе координат,
следовательно,
![]() .
.
Так как подвижная
система координат перемещается
поступательно, то
![]() – постоянные
векторы и их производные по времени
равны нулю, поэтому
– постоянные
векторы и их производные по времени
равны нулю, поэтому ![]() .
.
Это равенство
определяет скорость точки по отношению
к подвижной системе координат и называется
относительной скоростью точки
М. Обозначим эту скорость через
![]() .
.
Таким образом, имеем
![]() . (4.4)
. (4.4)
Полученное равенство выражает теорему о сложении скоростей: скорость точки в сложном движении равна сумме переносной и относительной скоростей.