

3.2. Скорость точки
Пусть в момент
времени
положение точки определяется
радиусом-вектором
![]() ,
а в момент
,
а в момент
![]() радиусом-вектором
радиусом-вектором
![]() .
Вектор
.
Вектор
![]()
будем называть
вектором перемещения точки за время
![]() (рис. 3.7).
(рис. 3.7).
Рис. 3.7. |
Отношение вектора
Скоростью в данный момент времени называется предел отношения вектора |
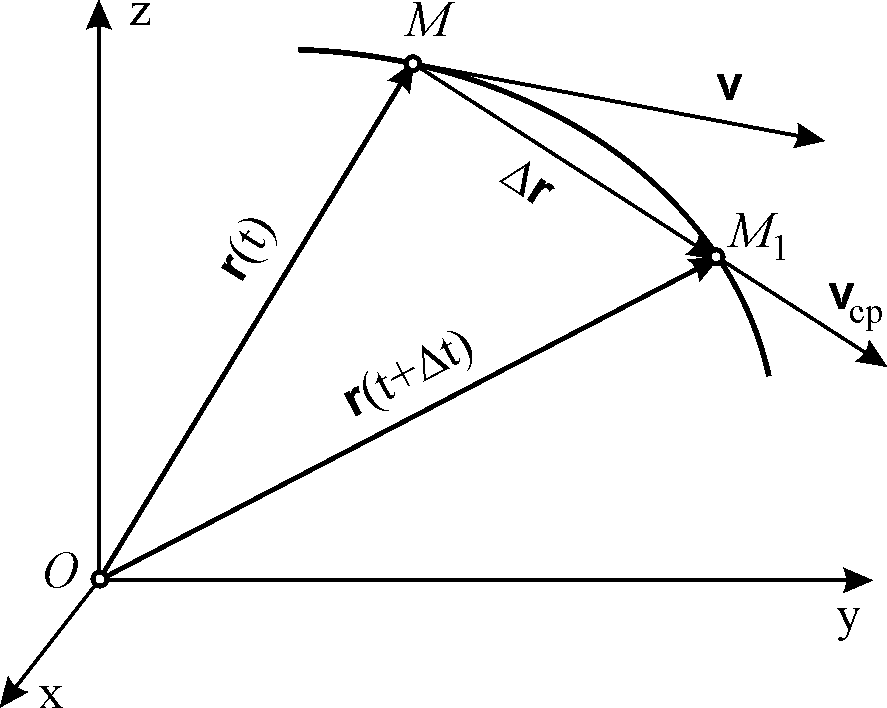
перемещения точки к промежутку времени, за который произошло это перемещение, когда этот промежуток времени стремится к нулю, т.е.
![]() . (3.9)
. (3.9)
Из этого определения
видно, что скорость точки равна
производной радиуса-вектора точки по
времени. На рис. 3.7 показаны
средняя скорость
![]() и скорость
и скорость
![]() точки М. Как следует из общей теории,
скорость точки
– этор
вектор, направленный по касательной к
траектории в сторону движения точки.
точки М. Как следует из общей теории,
скорость точки
– этор
вектор, направленный по касательной к
траектории в сторону движения точки.
3.2.1. Скорость точки при координатном способе задания движения Декартова система координат
Пусть движение точки задано в декартовой системе координат, принятой за неподвижную, т.е. пусть заданы координаты точки как функции времени
![]() ,
,
.
,
,
.
Согласно выражению (3.6) имеем .
Так как единичные
векторы
![]() выбранной системы координат постоянны,
то на основании формулы (3.9) получаем
выбранной системы координат постоянны,
то на основании формулы (3.9) получаем
![]() .
.
Рис. 3.8. |
На рис. 3.8 показано разложение скорости на составляющие по осям координатной системы Oxyz.
Таким образом,
проекции скорости
|
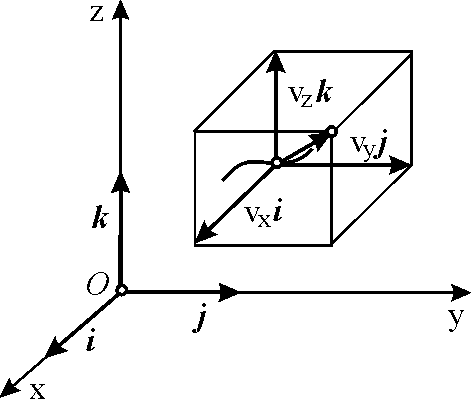
т.е. проекция скорости точки на координатную ось равна первой производной по времени от соответствующей этой оси координаты.
Модуль скорости определяется формулой
![]() , (3.10)
, (3.10)
а направление скорости – направляющими косинусами
 (3.11)
(3.11)
Если модуль скорости не изменяется с течением времени, то движение называется равномерным.
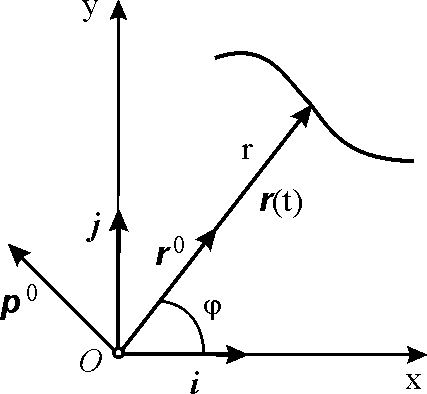
Полярные координаты
Введем в рассмотрение
единичные векторы:
![]() ,
направленный по радиусу-вектору в
сторону возрастания
,
и
,
направленный по радиусу-вектору в
сторону возрастания
,
и
![]() ,
повернутый относительно
на угол
,
повернутый относительно
на угол
![]() в сторону возрастания угла
(рис. 3.9). Единичные векторы
и
могут быть представлены через единичные
векторы
в сторону возрастания угла
(рис. 3.9). Единичные векторы
и
могут быть представлены через единичные
векторы
![]() координатных осей:
координатных осей:
![]() ,
,
![]() .
.
Рис.3.9. |
Рис. 3.10. |

Производные по времени от единичных векторов , определяются соотношениями
![]() , (3.12)
, (3.12)
![]() . (3.13)
. (3.13)
Радиус-вектор
,
определяющий положение точки, может
быть представлен в виде
![]() (рис. 3.9). При движении точки меняются
как модуль, так и направление радиуса-вектора
,
следовательно, и
(рис. 3.9). При движении точки меняются
как модуль, так и направление радиуса-вектора
,
следовательно, и
![]() ,
и
,
и
![]() являются функциями времени. На основании
равенства (3.9) имеем
являются функциями времени. На основании
равенства (3.9) имеем
![]() .
.
Используя соотношение (3.12), будем иметь
![]() .
.
Полученная формула
дает разложение вектора скорости на
две взаимно перпендикулярные составляющие:
радиальную
![]() и поперечную
и поперечную
![]() (рис. 3.10).
(рис. 3.10).
Проекции скорости на радиальное и поперечное направления
![]() и
и ![]() (3.14)
(3.14)
называются соответственно радиальной и поперечной скоростями. Модуль скорости находится по формуле
![]() . (3.15)
. (3.15)
3.2.2. Скорость
точки при естественном способе задания
движения. Пусть точка М движется
по какой-либо кривой (рис. 3.11). За
промежуток времени
![]() точка переместится по кривой из положения
М в положение М1. Дуга
точка переместится по кривой из положения
М в положение М1. Дуга
![]() ,
если движение точки происходит в сторону
положительного отсчета дуги (рис. 3.11 а),
и
,
если движение точки происходит в сторону
положительного отсчета дуги (рис. 3.11 а),
и
![]() ,
если движение происходит в противоположную
сторону (рис. 3.11 б). На
основании (3.9)
имеем
,
если движение происходит в противоположную
сторону (рис. 3.11 б). На
основании (3.9)
имеем ![]() .
.
Перепишем это равенство в виде
![]() .
.
Так как предел отношения дуги к стягивающей ее хорде равен по модулю единице, а предельное положение секущей ММ1 совпадает с направлением касательной к кривой в точке М, то
![]() ,
,
где ![]() – единичный
вектор касательной к кривой, направленный
в сторону положительного отсчета дуги.
– единичный
вектор касательной к кривой, направленный
в сторону положительного отсчета дуги.
Рис. 3.11. |
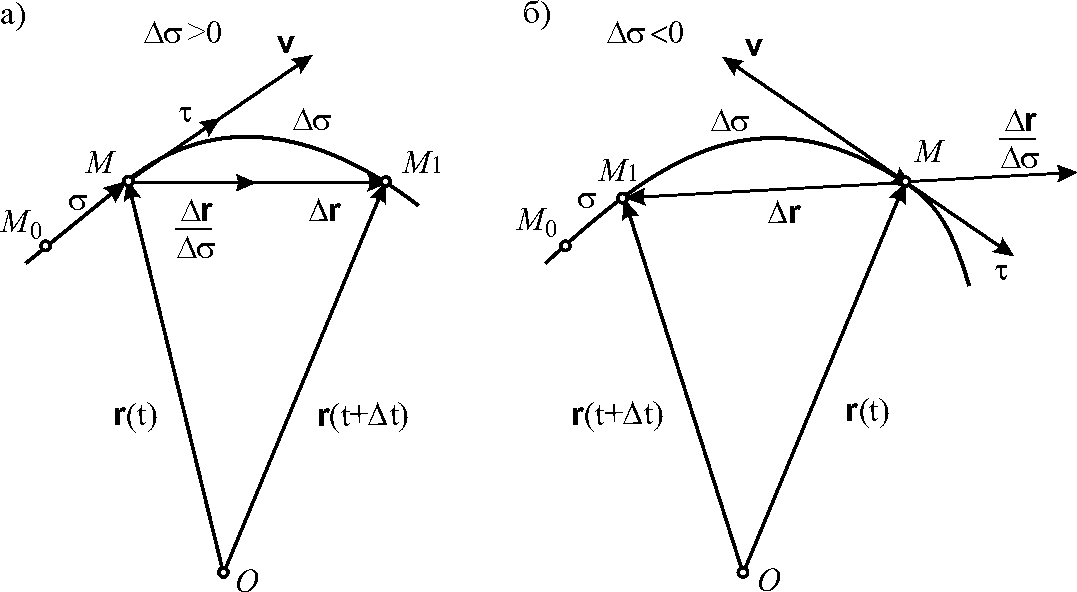
Действительно,
если
![]() ,
то вектор
,
то вектор
![]() направлен в сторону
направлен в сторону
![]() (см. рис. 3.11 а), а при
вектор
направлен в сторону, противоположную
(см. рис. 3.11 б). В обоих
случаях этот вектор, а следовательно,
и его предел
(см. рис. 3.11 а), а при
вектор
направлен в сторону, противоположную
(см. рис. 3.11 б). В обоих
случаях этот вектор, а следовательно,
и его предел
![]() ,
направлены в сторону возрастания дуги
(на рис. 3.11 положительное направление
отсчета дуги
выбрано вправо от начала отсчета М0).
,
направлены в сторону возрастания дуги
(на рис. 3.11 положительное направление
отсчета дуги
выбрано вправо от начала отсчета М0).
Учитывая, что ![]() ,
,
имеем ![]() .
(3.16)
.
(3.16)
Обозначая
![]() ,
получим
,
получим
![]() . (3.17)
. (3.17)
Из формулы (3.17)
следует, что
![]() .
Очевидно, что
.
Очевидно, что
![]() ,
если движение происходит в сторону
положительного отсчета дуги, и
,
если движение происходит в сторону
положительного отсчета дуги, и
![]() ,
если движение происходит в противоположную
сторону.
,
если движение происходит в противоположную
сторону.
Так как проходимый точкой путь всегда положителен, то элемент пути
![]()
и, следовательно, модуль скорости можно определить по формуле
![]() .
.