

8.2. Сложение поступательных движений
Рис. 8.1. |
Пусть
|
![]() . (8.1)
. (8.1)
В нашем случае
![]() и
и
![]() следовательно,
следовательно,
![]() . (8.2)
. (8.2)
Таким образом, у всех точек тела абсолютные скорости оказались одинаковыми, следовательно, при сложении поступательных движений твердого тела результирующее движение будет также поступательным и скорость результирующего движения равна сумме скоростей составляющих движений.
В случае поступательных движений, применяя последовательно формулу (8.1), можно показать, что результирующее движение также будет поступательным и его скорость будет равна сумме скоростей составляющих движений, т.е.
![]() .
.
Возможен случай, когда скорости всех точек тела только в данный момент времени оказываются равными между собой. Этот случай называют мгновенно-поступательным движением. Однако следует иметь в виду, что ускорения точек при этом различны.
8.3. Сложение вращений вокруг пересекающихся осей. Кинематические уравнения Эйлера
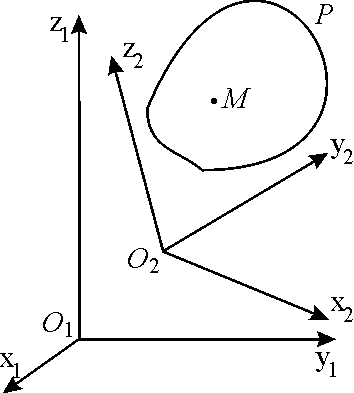
Рис. 8.2. |
Пусть тело Р
вращается в системе координат Оx2y2z2
вокруг оси z2 с угловой
скоростью
|

найти угловую скорость абсолютного движения тела, зная угловые скорости и составляющих вращений.
Найдем абсолютную скорость произвольной точки М тела. Для этого в формулу (8.1) следует подставить
![]() ,
, ![]() ,
,
где – радиус-вектор точки М; тогда
![]() .
.
С другой стороны, скорость той же точки М в абсолютном движении будет равна
![]() .
.
Сравнивая оба равенства, получим
![]() .
.
Так как точка М, а следовательно, и ее радиус-вектор произвольны, то
![]() . (8.3)
. (8.3)
Из формулы (8.3) следует, что совокупность двух вращений, происходящих вокруг пересекающихся осей, эквивалентна одному вращению, происходящему с мгновенной угловой скоростью, равной сумме угловых скоростей составляющих вращений.
Замечание.
В случае
![]() из (8.3) следует, что
из (8.3) следует, что
![]() .
Следовательно, совокупность двух
вращений вокруг одной и той же оси,
происходящих с одинаковыми по модулю,
но противоположно направленными угловыми
скоростями, эквивалентна покою. Такую
совокупность движений всегда можно
присоединять к любому сложному движению
тела.
.
Следовательно, совокупность двух
вращений вокруг одной и той же оси,
происходящих с одинаковыми по модулю,
но противоположно направленными угловыми
скоростями, эквивалентна покою. Такую
совокупность движений всегда можно
присоединять к любому сложному движению
тела.
Совокупность вращений вокруг пересекающихся в одной точке осей эквивалентна одному вращению с мгновенной угловой скоростью
![]() .
.
Полученное правило сложения вращений вокруг пересекающихся осей позволит нам теперь выразить проекции мгновенной угловой скорости тела, имеющего одну неподвижную точку О, через углы Эйлера и их производные.
Рис. 8.3. |
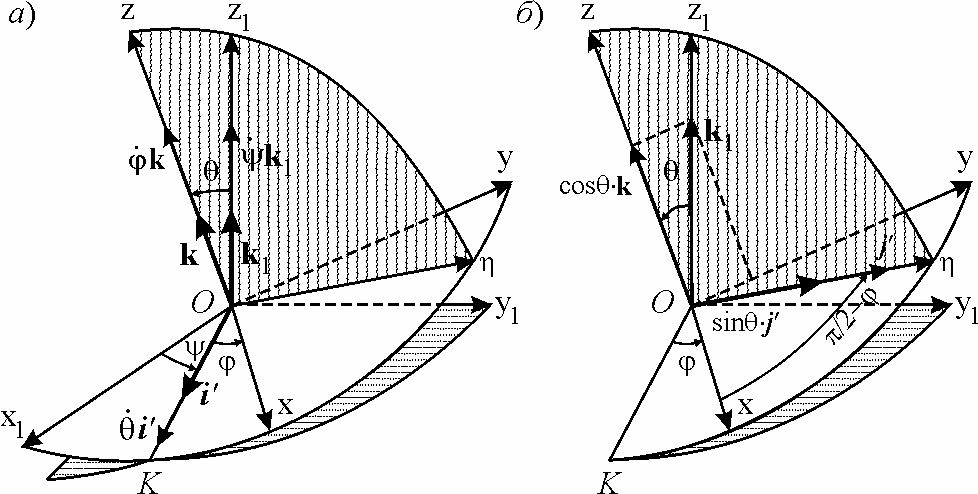
Напомним, что
положение подвижной системы координат
Oxyz, жестко связанной с телом, полностью
определяется относительно неподвижной
системы координат Оx1y1z1
углами Эйлера (рис. 8.3). Тело участвует
в трех вращениях: первое вращение,
соответствующее изменению угла прецессии
,
происходит вокруг неподвижной оси Оz1
с угловой скоростью
![]() ;
второе вращение, соответствующее
изменению угла нутации
,
происходит вокруг линии узлов ОК с
угловой скоростью
;
второе вращение, соответствующее
изменению угла нутации
,
происходит вокруг линии узлов ОК с
угловой скоростью
![]() ,
где
,
где
![]() – единичный
вектор линии узлов; наконец, третье
вращение, соответствующее изменению
угла собственного вращения
,
происходит вокруг оси Oz с угловой
скоростью
– единичный
вектор линии узлов; наконец, третье
вращение, соответствующее изменению
угла собственного вращения
,
происходит вокруг оси Oz с угловой
скоростью
![]() .
Следовательно, абсолютная угловая
скорость
тела будет
.
Следовательно, абсолютная угловая
скорость
тела будет
![]() , (8.4)
, (8.4)
Составим таблицу
направляющих косинусов единичных
векторов
![]() в системе подвижных осей Oxyz:
в системе подвижных осей Oxyz:
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
0 |
1 |
Поясним составление
первой строки этой таблицы (вторая и
третья строки непосредственно следуют
из рис. 8.3 а). Разложим единичный
вектор
на две взаимно перпендикулярные
составляющие, направив одну из них по
оси z (она равна
![]() ,
см. рис. 8.3 б); тогда вторая
составляющая, равная
,
см. рис. 8.3 б); тогда вторая
составляющая, равная
![]() ,
где
,
где
![]() – единичный
вектор вспомогательной оси
– единичный
вектор вспомогательной оси
![]() ,
будет находиться в плоскости ху.
Следовательно,
,
будет находиться в плоскости ху.
Следовательно,
![]() . (8.5)
. (8.5)
Вспомогательная
ось
составляет с осями х и у углы
![]() и
.
Проектируя единичный вектор
на оси х, у и z,
получим (напомним, что проекции единичных
векторов равны соответствующим
направляющим косинусам)
и
.
Проектируя единичный вектор
на оси х, у и z,
получим (напомним, что проекции единичных
векторов равны соответствующим
направляющим косинусам)
![]() ,
, ![]() ,
, ![]() .
.
Эти выражения и составляют первую строку таблицы направляющих косинусов.
Проектируя теперь обе части равенства (8.4) на оси х, у и z и учитывая таблицу косинусов, найдем проекции вектора угловой скорости тела на оси, жестко связанные с телом:
 (8.6)
(8.6)
Полученные соотношения носят название кинематических уравнений Эйлера.
Модуль угловой скорости определяется равенством
![]() . (8.7)
. (8.7)
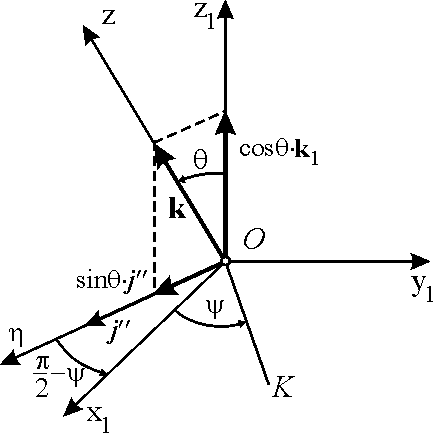
Таблица направляющих косинусов между единичными векторами в системе неподвижных осей Оx1y1z1 имеет вид
|
|
|
|
|
0 |
0 |
1 |
|
|
|
0 |
|
|
|
|
Для того чтобы
получить последнюю строку, мы разложили
вектор
на две составляющие, направив одну из
них по оси
(она равна
![]() ;
см. рис. 8.4); тогда вторая, равная
;
см. рис. 8.4); тогда вторая, равная
![]() ,
где
,
где
![]() – единичный
вектор новой вспомогательной оси
,
будет находиться в плоскости Оx1y1:
– единичный
вектор новой вспомогательной оси
,
будет находиться в плоскости Оx1y1:
Рис. 8.4. |
Третья строка второй таблицы получена проектированием этого равенства на оси , , и пользуясь второй таблицей направляющих косинусов, найдем проекции вектора угловой скорости на неподвижные оси координат: |
 (8.8)
(8.8)
Кинематические
уравнения Эйлера (8.6) и (8.8) устанавливают
связь между проекциями вектора угловой
скорости
на соответствующие оси, углами Эйлера
![]() и их первыми производными по времени.
и их первыми производными по времени.