

9.5. Контрольно-измерительные и сигнальные устройства
На самолётах с основной системой электроснабжения трёхфазного переменного тока с напряжением 200/115 В частотой 400 Гц предусмотрены следующие контрольно-измерительные и сигнальные устройства :
- в основной системе электроснабжения – для контроля тока генераторов предусматриваются индивидуальные амперметры для каждого генератора (Ил-86) или один амперметр с поворотным переключателем (Ту-154); для контроля напряжений и частоты генераторов и на шинах сетей – вольтметр и частотомер с поворотным переключателем;
- в системе 3х фазного переменного тока напряжением 36 В частотой 400 Гц для контроля напряжения источников и на шинах используется вольтметр с поворотным переключателем;
- в системе постоянного тока для контроля токов источников, как правило, используются индивидуальные амперметры, для контроля напряжений – вольтметр с поворотным переключателем;
10. Электрифицированные системы управления самолётом
10.1. Электромеханизмы дистанционного управления
Электромеханизмы дистанционного управления служат для дистанционного управления устройствами, системами и агрегатами – открывать и закрывать заслонки и краны, управлять триммерами, механизацией крыла, перестановкой стабилизатора и т.д. Электромеханизмы могут использоваться в любом месте самолёта и вертолёта, на требуют герметизации и дополнительного источника энергии, менее уязвимы в сравнении в пневматическими и гидравлическими механизмами, практически не подвержены влиянию температуры и давления.
В состав электромеханизмов дистанционного управления входят:
- малогабаритный высокооборотный электродвигатель постоянного тока, способный работать как при напряжении 27 В, так и 24 В, то есть от аккумуляторов;
- понижающий редуктор с большим коэффициентом передачи, как правило планетарный, или червячный, или их сочетание, обеспечивающий при понижении частоты вращения получение достаточно большого крутящего момента на валу;
- выходное устройство в виде штока, рейки, шестерни, вала со шлицами, обеспечивающее непосредственный привод к управляемому устройству или агрегату;
- фрикционная муфта, служащая для передачи к выходному устройству заданного крутящего момента, при достижении механизмом крайнего положения (достижении упора) сопротивление вращению резко возрастает, что приводит к пробуксовыванию муфты, предотвращая поломку устройства;
- концевые выключатели, размыкающие в крайних положениях механизма цепи электропитания и обеспечивающие включение соответствующей сигнализации;
- электромагнитные тормозные муфты (рис. 9.1.) – обеспечивают останов вала электродвигателя при снятии с электромеханизма питания.

Рис. 10.1. Электромагнитная тормозная муфта.
Вал 6 является валом электродвигателя. Якорь 3 может продольно перемещаться по шлицам вала. В обесточенном положении электромеханизма пружина 5 прижимает якорь вместе с фрикционным кольцом 1 к тормозному диску 2, обеспечивая заторможенное состояние привода. При подаче напряжения на электромеханизм напряжение поступает на электродвигатель и на обмотку 4 электромагнитной муфты. Обмотка создаёт магнитное поле, якорь притягивается к магнитопроводу 8, преодолевая усилие пружины и растормаживая вал электродвигателя. При обесточивании электромеханизма с помощью концевого выключателя или при снятия напряжения соответствующим выключателем из кабины экипажа пружина обеспечивает останов вала двигателя, прижимая фрикционное кольцо к тормозному диску. Электромагнитные тормозные муфты являются надёжными, эффективными устройствами, но при затормаживании мощных высокооборотных электродвигателей сложно обеспечить быстрый останов вследствие большой инерции ротора, большое количество кинетической энергии вращения переходит в тепловую энергию. Происходит значительный износ фрикционных элементов муфты. Учитывая, что на разгон электродвигателя и набор соответствующего уровня кинетической энергии тратится значительное количество электроэнергии, возможно от аккумуляторов, более рациональным выглядит останов не электродвигателя, а выходного вала механизма.
- электромагнитные муфты сцепления-торможения (рис. 9.2.) – в отличие от рассмотренных ранее электромагнитных тормозных муфт в них происходит нарушение механической связи между электродвигателем и приводным валом механизма, затормаживается только вал механизма, в то время, как вал электродвигателя продолжает вращаться по инерции.
Подвижный диск 1, дополнительный диск 9 и приводной вал 3 выполнены, как единое целое. В обесточенном положении механизма пружина 4, упирающаяся вправо в дополнительный диск 9, прижимает подвижный соединительный диск 1 к неподвижному фрикционному диску 2, обеспечивая его заторможенное состояние. При этом механической связи вала 3 с электродвигателем нет.
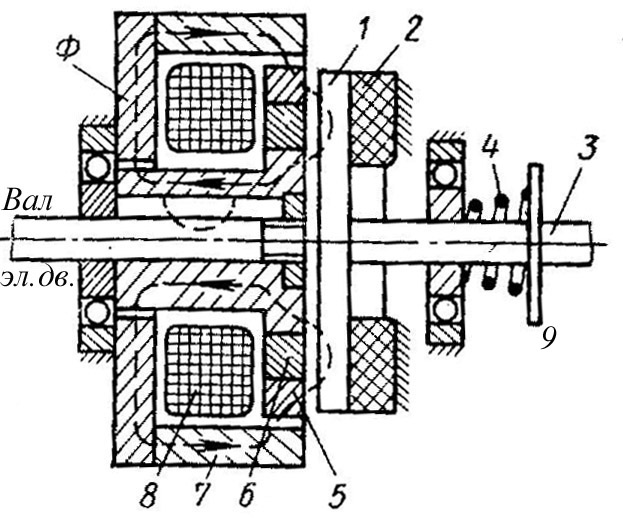
Рис. 10.2. Электромагнитная муфта сцепления-торможения
При подаче напряжения на электромеханизм оно подаётся на электродвигатель и на обмотку муфты сцепления-торможения, в обмотке 8 электромагнита муфты появляется ток, создавая магнитное поле. Преодолевая усилие пружины, электромагнит притягивает подвижный диск и прижимает его к фрикционным кольцам 5, 6, связывая этим электродвигатель с приводным валом 3. Вал начинает вращаться. При обесточивании электромеханизма пружина упирается в дополнительный диск 9, посредством вала связанный с диском 1, вызывая его отсоединение от фрикционных дисков 5, 6 и перемещение вправо до упора в фрикционный диск 2. Таким образом приводной вал 3 отсоединяется от электродвигателя и затормаживается.
Электромагнитные муфты сцепления-торможения нашли применение на самолётах практически во всех ответственных электромеханизмах большой мощности (в электромеханизмах управления закрылками, предкрылками, стабилизатором и др.).
- для быстрой остановки электромеханизмов дистанционного управления небольшой мощности используют схемы электродинамического торможения

Рис. 10.3. Схема электродинамического торможения привода:
а) для параллельного возбуждения
б) для последовательного возбуждения
Принцип электродинамического торможения состоит в том, что при отключении питания контакты 1-2 размыкаются, а 3-4 – замыкаются, отключенный и продолжающий вращаться по инерции электродвигатель переводится в режим генератора, работающего на нагрузку, которой является резистор R. Чем больше нагрузка, то есть чем больше ток, отбираемый от генератора, тем больше кинетической энергии вращения ротора преобразуется в электрическую энергию, тем быстрее происходит его останов, так как ротор вращается по инерции. При электродинамическом торможении происходит сильный нагрев резистора R, который тем больше, чем мощнее останавливаемый двигатель и чем больше его частота вращения, по этой причине электродинамическое торможение используется только для быстрого остановы маломощных электромеханизмов;
- для привода наиболее ответственных элементов самолётов (перемещение закрылков и предкрылков, перестановка стабилизатора и др.) используются электромеханизмы, включающие в себя два электродвигателя, объединённые через дифференциальный (суммирующий) редуктор. Электродвигатели получают электропитание от разных распределительных устройств с помощью проводов, проложенных по разным бортам. При прекращении подачи напряжения на один из электродвигателей электромеханизм сохраняет работоспособность с сохранением крутящего момента на выходном валу, но скорость вращения выходного вала при этом уменьшается в 2 раза. В таком электромеханизме каждый электродвигатель комплектуется электромагнитной муфтой сцепления-торможения, а в выходном валу дополнительно устанавливается фрикционная муфта.