

1.5 Уточнение коней: подпрограмма excel “Подбор параметра”.
EXCEL обладает большим набором средств, позволяющих решить те или иные вычислительные задачи. Для решения нелинейного уравнения предусмотрена подпрограмма Подбор параметра. Продемонстрируем действие этой подпрограммы на предыдущем примере.
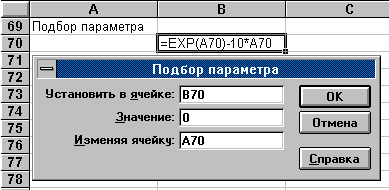
Для того, чтобы найти другой корень, лежащий на интервале [3,5; 4] необходимо изменить начальное приближение, которое в нашей таблице находится в ячейке A70. Запишем в эту ячейку одну из границ интервала, например, 4, и снова выполним процедуру подбора параметра. Содержимое клеток A70 и B70 изменится, теперь в этих клетках появятся координаты большего корня.
2. Системы линейных алгебраических уравнений.
В общем виде система линейных алгебраических уравнений записывается так: a11x1+a12x2+... +a1nxn = b1
a21x1+a22x2+... +a2nxn = b2
....................................................
an1xn+an2x2+... +annxn = bn
Совокупность коэффициентов этой системы запишем в виде квадратной матрицы A из n строк и n столбцов
a11 a12 ... a1n
a21 a22 ... a2n
...........................
an1 an2 ... ann
Используя матричное исчисление, исходную систему уравнений можно записать в виде
А*Х = В,
где Х - вектор- столбец неизвестных размерностью n, а В - вектор- столбец свободных членов, тоже размерностью n.
Эта система называется совместной, если она имеет хотя бы одно решение, и определенной, если она имеет одно единственное решение. Если все свободные члены равны нулю, то система носит название однородной.
Необходимым и достаточным условием существования единственного решения системы является условие DET=0, где DET - определитель матрицы А. На практике при вычислениях на компьютере не всегда удается получить точное равенство DET нулю. В том случае, когда DET близко к нулю, системы называются плохо обусловленными. При их решении на компьютере малые погрешности в исходных данных могут привести к существенным погрешностям в решении. Условие DET~0 является необходимым для плохой обусловленности системы, но не достаточным. Поэтому при решении системы на ЭВМ требуется оценка погрешности, связанной с ограниченностью разрядной сетки компьютера.
Существуют две величины, характеризующие степень отклонения полученного решения от точного. Пусть Хк - истинное решение системы, Хc - решение, полученное тем или иным методом на ЭВМ, тогда погрешность решения: Е = Хк - Хc. Вторая величина - невязка, равная R = B - A*Xc. В практических расчетах контроль точности осуществляется с помощью невязки, хотя это и не совсем корректно.