

Глава 18. Аппаратура приема-передачи информации |
256 |
Контрольные вопросы к главе 18
1. Что включают в себя каналы обмена между центральными и периферийными устройствами?
2.Из каких устройств состоит аппаратура передачи данных (АПД)?
3.Перечислите основные характеристики АПД.
4.Поясните понятия “скорость передачи данных”, “удельная скорость передачи данных; от чего они зависят?
5. Какого значения не должен превышать коэффициент ошибки по кодовым комбинациям?
6.Что понимается под стандартным интерфейсом?
7.Назовите четыре основных принципа проектирования ЭВС, на которых выполнены стандартные интерфейсы.
8.Назовите отличие асинхронной передачи данных и синхронной.
9.Назовите четыре типа структур связей интерфейсов.
10.Назовите функции, реализуемые интерфейсом.
11.Назовите два способа управления операцией селекции.
12.Перечислите варианты способов управления операцией селекции.
13.Назовите 5 основных классов интерфейсов.
14.Перечислите межуровневые интерфейсные услуги ВС.
15.Назовите четыре категории, на которые подразделяются интерфейсы по конструктивному исполнению.
Глава 19. Автоматические устройства ввода-вывода аналоговой информации в ЭВМ |
257 |
Глава 19. АВТОМАТИЧЕСКИЕ УСТРОЙСТВА ВВОДА-ВЫВОДА АНАЛОГОВОЙ ИНФОРМАЦИИ В ЭВМ
19.1. Назначение устройств ввода-вывода аналоговой информации в ЭВМ
Рост промышленного производства разнообразных средств вычислительной техники привел к интенсивному внедрению ЭВМ в процессы измерений и управления. Использование малых ЭВМ в качестве элемента измерительной системы позволяет повысить точность измерений, увеличить их производительность, автоматизировать процесс получения, накопления и обработки информации.
Использование ЭВМ в контуре систем управления позволяет реализовывать более сложные и эффективные по сравнению с аналоговыми системами управления алгоритмы управления с легко изменяемой структурой, осуществлять изменение режима и параметров управления по заданной программе в реальном времени.
Цифровые системы управления имеют целый ряд преимуществ по сравнению с аналоговыми системами. Основными из них являются:
1) Возможность модернизации и внедрения более прогрессивных и эффективных алгоритмов управления, например, адаптивных. Внедрение, исследование и анализ новых алгоритмов управления в цифровой системе осуществляется значительно проще.
2)Возможность изменения структуры и параметров алгоритмов управления, которое значительно проще осуществлять программным путем, чем изменениями механических или электрических параметров.
3)Возможность простого программного изменения режима и параметров управления
вреальном времени, которого невозможно достичь в аналоговых системах управления.
4)Стабильность и повторяемость характеристик цифровых систем управления в течение неограниченного промежутка времени, отсутствие дрейфов и интерференций отдельных частей.
5)Возможность совмещения функций управления с функциями получения (измерения) и обработки информации. Физические величины, используемые цифровой системой для управления в ряде приложений являются одновременно и информативными величинами, определяющими действующие в контролируемой системе процессы.
На рис. 19.1 представлена обобщенная функциональная схема цифровой системы управления, включающая объект управления или контролируемый процесс и цифровой регулятор. Контролируемые физические величины или параметры процесса (световой поток, температура, давление, электрическое или магнитное поле и т.д.) измеряются системой датчиков, преобразующих физические величины в электрические сигналы. В качестве датчиков могут использоваться фотоэлектрические и пьезоэлектрические приборы, термопары, индуктивные и емкостные сенсоры и т.д. Электрические сигналы, снимаемые с выхода датчика, несут в себе информацию о характеристиках регистрируемого физического воздействия, причем эта информация может заключаться в различных параметрах сигналов: величине непрерывно изменяющегося электрического напряжения или тока, амплитуде импульсов. Для того чтобы цифровой регулятор мог воспринимать эту информацию, ее надо пре-

Глава 19. Автоматические устройства ввода-вывода аналоговой информации в ЭВМ |
258 |
образовать в цифровой код. Поэтому непременным элементом цифровой системы управления являются аналого-цифровые преобразователи (АЦП).
Рис. 19.1 Функциональная схема цифровой системы управления.
Цифровой регулятор в соответствии с определенным алгоритмом управления и по определенной программе вырабатывает управляющие объектом или процессом сигналы, которые должны определенным образом через всевозможные исполнительные устройства (электромагниты, электромагнитные муфты, электроприводы, двигатели и т.д.) воздействовать на объект управления. Исполнительные устройства обычно управляются аналоговыми электрическими сигналами (током, напряжением), для чего в системе управления применяются цифро-аналоговые преобразователи (ЦАП), преобразующие цифровые управляющие сигналы регулятора в используемые исполнительными устройствами аналоговые эквиваленты. Следует отметить, что структура рисунка 19.1 является общей для большинства цифровых систем управления другого назначения.
Функции цифрового регулятора может выполнять электронная вычислительная машина (ЭВМ) или специализированный контроллер. Если же стоит задача совмещения функций управления объектом или процессом и функций получения и обработки информации о данном объекте, то в системе со специализированным контроллером должна быть введена дополнительная ЭВМ, занимающаяся только получением и обработкой информации, т.к. контроллеры обладают недостаточной мощностью (быстродействием и особенно памятью) для выполнения обеих функций. Существует другая концепция использования в качестве цифрового регулятора и системы сбора и обработки информации одной достаточно мощной ЭВМ, тем более что для сбора информации ЭВМ должна содержать АЦП, аналогичные используемым для управления.
В качестве управляющей ЭВМ можно использовать IBM-РС совместимый персональный компьютер. Как зарубежный, так и отечественный рынок широко насыщен компьютерами данного класса, которые обладают достаточно высокими техническими характеристиками для решения поставленной задачи.
Таким образом, задача разработки цифровой системы управления сводится в первую очередь к разработке принципов построения и программирования универсальной системы ввода-вывода аналоговой информации в ЭВМ и из нее. Система ввода-вывода может быть реализована в виде универсальной платы стандартного подключения, размещаемой в одном из свободных слотов внутри корпуса компьютера и связанной с компьютером через общую шину. Универсальность системы и платы ввода-вывода заключается в том, что она может размещаться в любом IBM-PC coвместимом компьютере и использоваться для любых задач цифрового управления или сбора и обработки информации, для которых достаточны реализованные в системе разрядность и быстродействие ввода-вывода информации. Существенным преимуществом данной концепции является возможность использования
Глава 19. Автоматические устройства ввода-вывода аналоговой информации в ЭВМ |
260 |
|
1 |
U |
оп |
|
1 |
4 |
U |
оп |
|
1 |
U |
оп |
R |
2 |
|
R |
|
|
R |
8 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2R |
|
|
|
2R |
|
|
|
2R |
|
|
|
2R |
|
|
|
|
|
|
|
2R |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Uоп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z3 |
z2 |
|
|
|
|
z1 |
|
|
|
z0 |
|
|
|
|
|
|
|
|
R1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uвых |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
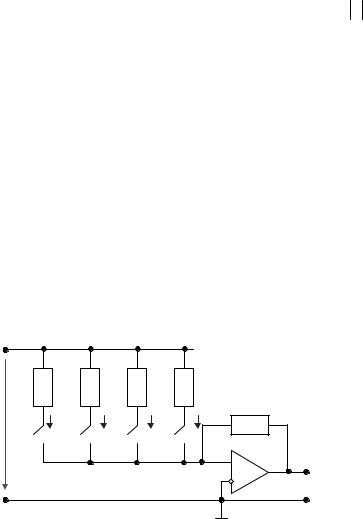
Рис. 19.3. Схема ЦАП с матрицей R-2R |
|||||||||||||||||
Коэффициенты передачи K = − |
|
U вых |
по входам 20, 2’, 22, 23 равны соответственно: |
|||||||||||||||||||||||||
|
U о п |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
0 |
= |
R1 |
Z |
0 |
; K |
= |
2R1 |
Z |
; K = |
|
4R1 |
Z |
2 |
; K= |
3 |
8R1 |
Z |
3 |
, |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
R 0 |
|
|
|
|
|
R 0 |
|
|
|
R 0 |
|
|
|
R 0 |
|
|
|
|
|
|
|
||||
где Z0 - Z3 - числа принимающие значение 0 или 1 в зависимости от положения соответствующих ключей.
Выходное напряжение ЦАП определяется суммой:
U |
|
= − U |
|
(K + |
K+ |
|
K+ |
|
K= − ) |
U |
R1+ |
(Z |
|
+ 2Z |
|
+ |
4Z |
|
8Z |
|
). |
|
вых |
|
о п |
0 |
|
1 |
|
2 |
3 |
|
о п R 0 |
0 |
|
1 |
|
|
2 |
|
3 |
|
|
Таким образом четырехразрядный двоичный код преобразуется в уровень Uвых в диапазоне
от 0 до 15∆ U, где ∆ U = U R1 шаг квантования. Для уменьшения погрешности квантова-
о п R 0
ния необходимо увеличивать число двоичных разрядов ЦАП. Недостатком схемы на рис. 19.2 являются:
-жесткие требования к точности и стабильности резисторов;
-изменение нагрузки источника Uоп в зависимости от положения ключей, что требует стабилизации напряжения Uоп.
От перечисленных недостатков свободна схема (рис.19.3), где используется матрица резисторов R-2R, имеющая постоянное входное сопротивление со стороны источника опорного напряжения.
Выходное напряжение ЦАП определяется выражением:
U |
|
= − U |
|
R1 |
(Z + |
2Z+ |
|
4Z+ |
|
8Z |
|
) . |
|
о п 16R |
|
|
|
||||||||
|
вых |
|
0 |
|
1 |
|
2 |
|
3 |
|
||
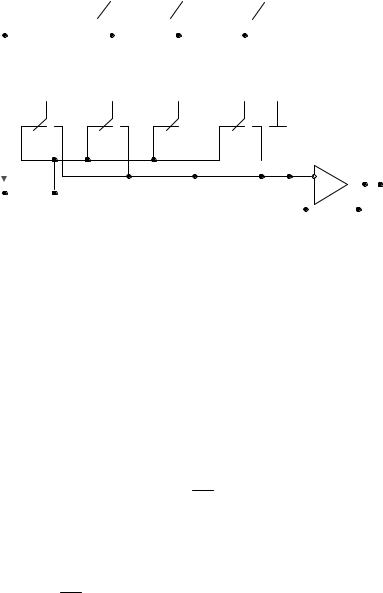
Для переключения резисторов применяют транзисторные ключи, например, на полевых транзисторах (рис. 19.4).
Глава 19. Автоматические устройства ввода-вывода аналоговой информации в ЭВМ |
261 |
||
|
R |
|
|
|
2R |
2R |
|
|
VT1 |
R1 |
|
|
VT2 |
|
|
|
|
|
Uвых |
|
|
z0 |
|
|
Рис. 19.4. Схема транзисторных ключей |
|
|
|
|
|
Uцап |
ГИ |
Сч |
ЦАП |
К |
|
|
Выход (код) |
Uвх |
Рис. 19.5 представлена функциональная схема АЦП последовательного счета |
|||
U
Uцап
Uвх
∆ U
t1 t
Рис. 19.6. Временная диаграмма работы АЦП последовательного счета
Рассмотренные принципы организации ЦАП используются при построении АЦП. На рис. 19.5 представлена функциональная схема АЦП последовательного счета.
Генератор импульсов ГИ вырабатывает последовательность импульсов, которая с помощью счетчика Сч преобразуется в двоичный код. Этот код управляет ключами ЦАП. Выходное напряжение ЦАП поступает на один из входов компаратора К, где сравнивается с входным напряжением Uвх, поданным на другой вход компаратора. При равенстве напряжений Uвх и Uцап в момент времени t1 (рис. 19.6) компаратор выдает сигнал, останавливающий работу генератора импульсов. При этом на выходе счетчика Сч фиксируется двоичный код, соответствующий напряжению Uвх.