

13. Обобщенные модели (а - схемы). Понятие агрегата. [1/1]
Обобщенный (универсальный) подход базируется на понятии агрегативной системы. Она представляет собой формальную схему общего вида, которую называют А – схемой.
При агрегативном описании моделируемый объект (система) декомпозируется на конечное число подсистем с сохранением связей, которые обеспечивают их взаимодействие. В результате декомпозиции, система представляется в виде многоуровневой конструкции из взаимосвязанных элементов, которые объединяются в подсистемы различных уровней. В качестве элемента А – схемы выступает агрегат.
Каждый
агрегат An,
![]() характеризуется:
характеризуется:
T – множеством моментов времени
X – множеством входных сигналов
Y – множеством выходных сигналов
Z – множеством состояний
Процессы
перехода агрегата из одного состояния
в другое происходит за малый промежуток
времени, т.е. имеет место скачек состояний![]() ,
т.е. переход из состоянияz(t1)
в состояние z(t2)
происходит скачком (z(t2)≠z(t1)).
,
т.е. переход из состоянияz(t1)
в состояние z(t2)
происходит скачком (z(t2)≠z(t1)).
Эти
переходы определяются собственными
(внутренними) параметрами схемы и
входными сигналами
![]() .
.
В начальный момент времени t0 состояние z0=z(t0) задается распределением L[z(t0)].
Предполагая, что процесс функционирования агрегата в моменты поступления входных сигналов Хn описываются случайным оператором V:
z(tn+0)=V[tn, z(tn), xn], где tn+0 – скачок, tn – момент поступления входного сигнала.
Процесс
функционирования (tn,tn+1),
t![]() (tn,tn+1)
описывается случайным оператором
(tn,tn+1)
описывается случайным оператором
![]() :
:
z(t)=
![]() [t,
tn,
z(tn+0)]
[t,
tn,
z(tn+0)]
На
оператор
![]() не накладывалось никаких ограничений,
поэтому допустимы скачки состояний
не накладывалось никаких ограничений,
поэтому допустимы скачки состояний![]() в
моменты времени, которые не являются
моментами поступления входных сигналов.
Моменты скачков будем называтьособыми
моментами времени
в
моменты времени, которые не являются
моментами поступления входных сигналов.
Моменты скачков будем называтьособыми
моментами времени
![]() ,
а состояния
,
а состояния![]() -особыми
состояниями,
тогда:
-особыми
состояниями,
тогда:
![]()
W
– частный случай оператора
![]() .
.
На
множестве Z
выделяется Z(Y),
что если
![]() достигаетZ(Y),
то это является моментом выдачи выходного
сигнала.
достигаетZ(Y),
то это является моментом выдачи выходного
сигнала.
![]() ,
где G
– некоторый случайный оператор.
,
где G
– некоторый случайный оператор.
An=<T,X,Y,Z,
Z(Y),H,V,
![]() ,W,G>
- описание отдельного агрегата.
,W,G>
- описание отдельного агрегата.
При моделировании реальных систем применяют А-схемы, которые представляют собой конструкции из отдельных агрегатов, связи между ними задаются с помощью оператора сопряжения R.
23
14. Структура агрегативной системы. Особенности функционирования. [1/3]
Последовательность входных сигналов, расположенных в порядке их поступления в А – схему называют входным сообщением или X–сообщением.
Последовательность выходных сигналов упорядоченную относительно времени выдачи называют выходным сообщением или Y–сообщением.
Информация, которая циркулирует в А–схеме делиться на внутреннюю и внешнюю. Внешняя поступает от внешних объектов, а внутренняя вырабатывается агрегатами А–схемы.
Обмен информации А–схемы с внешней средой происходит через агрегаты, которые называют полюсами. Различают входные полюсы, на которые поступают X–сообщения и выходные полюсы – это агрегаты, выходная информация которых представляет Y–сообщения.
Каждый
агрегат An
имеет входные контакты![]() и
выходные контакты
и
выходные контакты![]()
![]()
Введем ряд предположений о функционировании А–схемы:
1) Взаимодействие между А–схемой и внешней средой, а также между отдельными агрегатами внутри системы, осуществляется при передачи сигналов. 24
2 )
Для описания сигнала достаточно
некоторого конечного набора характеристик.
)
Для описания сигнала достаточно
некоторого конечного набора характеристик.
3) К входному контакту любого элемента подключается не более чем один элементарный канал. К выходному – любое конечное число элементарных каналов, при условии, что ко входу одного и того же элемента А–схемы направляется не более чем один из упомянутых каналов.
4) Элементарные сигналы мгновенно передаются в А–схеме независимо друг от друга по элементарным каналам.
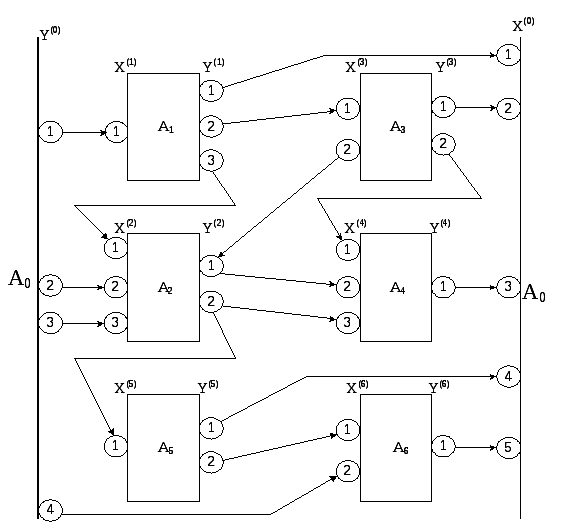
Внешняя среда обозначается фиктивным агрегатом A0:

Для
любого агрегата, включая A0,
в рамках принятых предположений, можно
записать, что агрегат характеризуется
множеством входных контактов
![]() и множеством выходных контактов
и множеством выходных контактов![]() ,
тогда пара
,
тогда пара
![]() представляет математическую модель
элементаAn,
которая используется для формального
описания сопряжения его с другими
элементами А–схемы и с внешней средой.
представляет математическую модель
элементаAn,
которая используется для формального
описания сопряжения его с другими
элементами А–схемы и с внешней средой.
В
силу предположения о независимости
передачи сигналов, каждому входному
контакту
![]() соответствует не более чем 1 выходной
контакт
соответствует не более чем 1 выходной
контакт![]() ,
соединенный с ним элементарным каналом
,
соединенный с ним элементарным каналом![]() .
.
Можно
ввести однозначный оператор R.
![]() ,
который имеет область определения на
множестве
,
который имеет область определения на
множестве![]() и область значений
и область значений![]() .
.
Совокупность
множеств
![]()
![]() и оператор сопряженияR
образуют схему сопряжения элементов в
систему.
и оператор сопряженияR
образуют схему сопряжения элементов в
систему.
25
В данном случае это одноуровневая схема
сопряжения.
данном случае это одноуровневая схема
сопряжения.
|
n |
i | ||||
|
1 |
2 |
3 |
4 |
5 | |
|
0 |
1,1 |
3,1 |
4,1 |
5,1 |
6,1 |
|
1 |
0,1 |
|
|
|
|
|
2 |
1,3 |
|
|
|
|
|
3 |
1,2 |
2,1 |
|
|
|
|
4 |
3,2 |
2,1 |
2,2 |
|
|
|
5 |
2,2 |
|
|
|
|
|
6 |
5,2 |
0,4 |
|
|
|
n – номер агрегата
i – номер контакта
k – номер элемента
l – номер контакта с которым соединен Хi(n)
k,l – ячейка
Если столбцы и строки такой таблицы пронумеровать двойными индексами n,I и k,l и на пересечении помещать единицу для контактов n,i, и k,l, которые соединены элементарным каналом, иначе 0, то получим матрицу смежности ориентированного графа.
Вершины этого графа – это контакты агрегата An, а дуги – элементарные каналы А–схемы.
Упорядоченную
совокупность операторов An
![]() ,
агрегата A0
и оператора R
считают А-схемой при следующих
ограничениях:
,
агрегата A0
и оператора R
считают А-схемой при следующих
ограничениях:
1) Каждый элементарный канал, передающий сигналы во внешнюю среду должен начинаться в одном из выходных контактов одного из агрегатов
А-схемы. Каждый элементарный канал, передающий сигнал из внешней среды должен заканчиваться на одном из входных контактов агрегатов
А–схемы.
2) Сигналы в А–схеме передаются непосредственно от одного агрегата к другому без устройств, которые могут отсеивать сигналы по каким-либо признакам.
3) Необходимо согласование функционирования агрегатов во времени.
4) Сигналы между агрегатами А–схемы передаются мгновенно без перекодирования и исключения сигнала.
26