

8. Дискретно стохастические модели. (p- схемы). [1/1]
Т .к.
сущность дискретизации времени при
дискретно – стохастическом подходе
остается аналогически конечным автоматом,
то влияние стохастичности рассмотрим
на разновидности этих автоматов, а
именно на вероятностных автоматах.Вероятностный
автомат –
это дискретный потактный преобразователь
информации с памятью, функционирование
которого, в каждом такте, зависит только
от состоянии памяти в нем и может быть
описано стохастически.
.к.
сущность дискретизации времени при
дискретно – стохастическом подходе
остается аналогически конечным автоматом,
то влияние стохастичности рассмотрим
на разновидности этих автоматов, а
именно на вероятностных автоматах.Вероятностный
автомат –
это дискретный потактный преобразователь
информации с памятью, функционирование
которого, в каждом такте, зависит только
от состоянии памяти в нем и может быть
описано стохастически.
Рассмотрим
множество G
элементами которого являются (xj,zs)
, xj
![]() X,
zs
X,
zs
![]() Z
Z
Если
существует два такие функции
![]() ,
f
с помощью которых выполняется отображение
G
,
f
с помощью которых выполняется отображение
G![]() Z,
G
Z,
G![]() Y,
то говорят что пятерка элементов
F=<Z,X,Y,
Y,
то говорят что пятерка элементов
F=<Z,X,Y,![]() ,f>
определяет автомат детерминированного
типа.
,f>
определяет автомат детерминированного
типа.
Введем
в рассмотрение более общую математическую
схему Ф(zk,yj)
yj![]() Y
Y
Потребуем, чтобы любой элемент множества G порождал на множестве Ф некоторый закон распределения
Элементы из Ф (z1 ,y1) (z1 ,y2) …(zk ,yJ-1) (zk ,yJ)
(xi,zs) b11 b12 bk(J-1) bkJ
![]() ;
bkj
– это вероятность перехода автомата в
состояние zk
и выдачи выходного сигнала yj
,
если автомат находиться в состоянии zs
и на его вход поступил входной сигнал
xi
;
bkj
– это вероятность перехода автомата в
состояние zk
и выдачи выходного сигнала yj
,
если автомат находиться в состоянии zs
и на его вход поступил входной сигнал
xi
Число таких распределений равно числу элементов множества G. Четверка элементов P=<Z,X,Y,B > называется вероятностным автоматом.
Вероятностный автомат Милли
Пусть элементы множества G порождает некоторые законы распределения на множествах Z и Y.
Элементы из Y y1 ,y2 ….., yJ-1 ,yJ
(xi,zs) q1 ,q2 ….., qJ-1 ,qJ
Элементы из Z z1 , z2 ….., zK-1 , zK
(xi,zs)
![]() 1
,
1
,
![]() 2
…..,
2
…..,
![]() K-1,
K-1,![]() K
K
![]()
![]() qj
и
qj
и![]() k,это
вероятности перехода автоматов в
состояние zk
и выдачи выходного сигнала xi
,
если автомат находиться в состоянии zs
и на его вход поступил входной сигнал
xI.
k,это
вероятности перехода автоматов в
состояние zk
и выдачи выходного сигнала xi
,
если автомат находиться в состоянии zs
и на его вход поступил входной сигнал
xI.
Если
для всех k
и j
выполняется условие
![]() kqj=bkj,
то такой P-
автомат называется вероятностным
автоматом Милли.
kqj=bkj,
то такой P-
автомат называется вероятностным
автоматом Милли.
Вероятностный автомат Мура
Пусть определение выходного сигнала P–автомата завит лишь от того состояния, в котором находится автомат в данном такте работы.
Элементы из Y y1 ,y2 ….., yI-1 ,yI
zk s1 ,s2 ......., sI-1 ,sI
s![]() i
– вероятность выдачи выходного сигнала
yi
при условии ,что автомат находится zk
i
– вероятность выдачи выходного сигнала
yi
при условии ,что автомат находится zk
Если для всех k и i выполняется условие zksi=bki, то такой P- автомат называется вероятностным автоматом Мура.
13
9. Z – детерминированные и y – детерминированные вероятностные автоматы. [1/2]
Если выходной сигнал Р–автомата определяется детерминировано, то такой автомат называется Y – детерминированным вероятностным автоматом.
У Z- детерминированного вероятностного автомата выбор нового состояния является детерминированным.
Пример 1: Y – детерминированный вероятностный автомат задан таблицей переходов и таблицей выходов.
-
Zk
Zk
Z1
Z2
…
ZK-1
ZK
Z1
P11
P12
…
P1(K-1)
P1K
Z2
P21
P22
…
P2(K-1)
P2K
…
…
…
…
…
…
Zk
Pk1
Pk2
…
PK(K-1)
PKK
Z
… z1
z2
… zK-1
zK
;Y
… yi1
yi2
…
yi(K-1)
yiK
;Pij
zi
->
zj
;![]()
Таблицу переходов можно представить в виде квадратной матрицы размером KxK, её называют матицей переходных вероятностей или матрицей переходов.
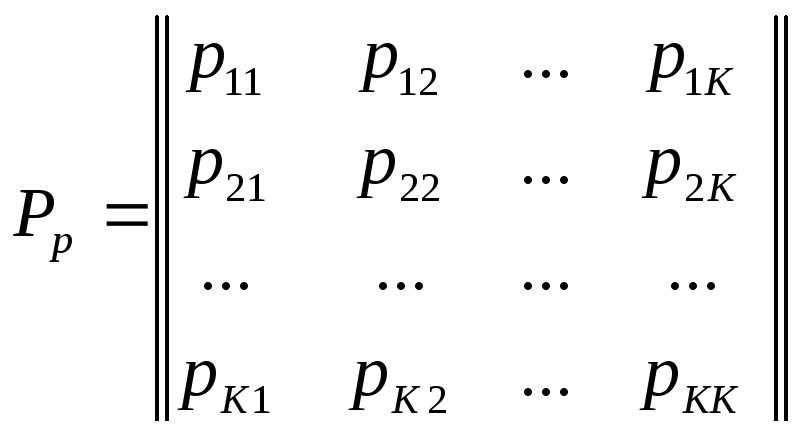
Для описания вероятностей также требуется задать начальное распределение вероятностей.
Z
… z1
z2
…
zk
;D … D1
D2
…
Dk
;![]()
dk – вероятность того, что в начале работы Р-автомат находится в состоянии zk
Размер P’p матрицы (k+1)(k+1)
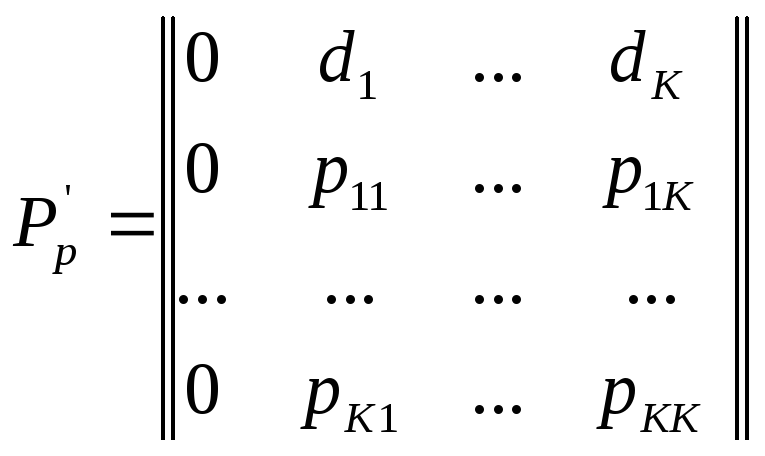

Полагаем, что до начала работы (до нулевого такта времени) автомат всегда находится в состоянии zo. В нулевом такте его состояние определяется распределением D. Дальнейшая смена состояний определяется матрицей Pp
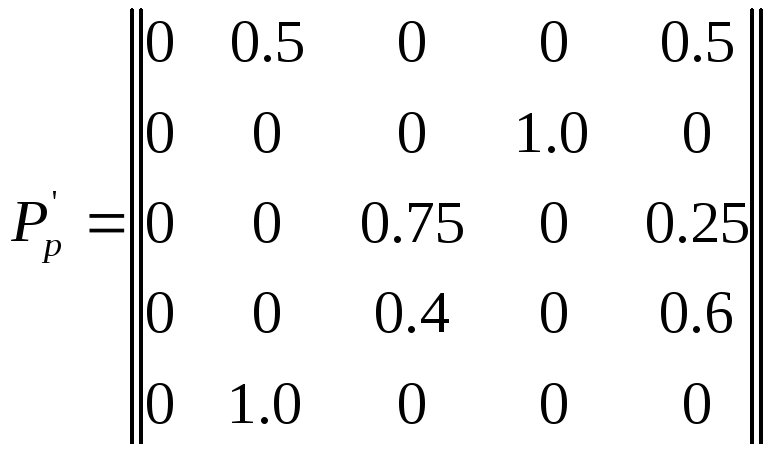
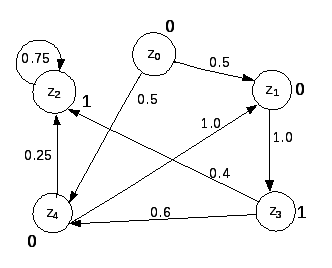
Пример 2: задан Y-детерминированный автомат Р-автомат, следующим образом:
14
|
Z |
z0 |
z1 |
z2 |
z3 |
z4 |
|
Y |
0 |
0 |
1 |
1 |
0 |
![]() -
дискретная
нелинейная стохастическая система
-
дискретная
нелинейная стохастическая система
15