

Задачи к разделу
Задача 1.1.1. Убедитесь, что для матрицы
вида (1.1.46) при
![]() и
и
![]() для характеристического многочлена
справедливо представление
для характеристического многочлена
справедливо представление
.
Задача 1.1.2. Для системы с передаточной функцией

запишите представление в пространстве состояния с использованием управляемой и наблюдаемой канонических форм.
Задача 1.1.3. Убедитесь в том, что для
системы
![]() изображение по Лапласу для фундаментальной
матрицы
изображение по Лапласу для фундаментальной
матрицы
![]() определяется как
определяется как
![]() .
.
Р е ш е н и е. Запишем выходной сигнал
системы
![]() при нулевых начальных условиях в виде
при нулевых начальных условиях в виде
 .
.
Применяя преобразование Лапласа, получаем
![]() .
.
Отсюда с очевидность следует, что
![]() .
.
Задача 1.1.4. Покажите, что ЧХ может быть определена, как отношение преобразований Фурье для выходного и входного сигналов.
Р е ш е н и е. Полагая, что входной
сигнал имеет вид (1.1.26) при
![]() ,
т.е.
,
т.е.
![]() ,
и используя таблицу П1.1, запишем для
него преобразование Фурье
,
и используя таблицу П1.1, запишем для
него преобразование Фурье
![]() .
.
Принимая во внимание вид выходного
сигнала
![]() ,
можем записать преобразование Фурье
,
можем записать преобразование Фурье
![]() .
.
Отсюда с очевидностью следует, что отношение преобразований Фурье выходного и входного сигналов и представляет собой выражение для ПФ, задаваемое соотношением (1.1.32).
Задача 1.1.5. Найдите весовую и передаточную функцию и частотную характеристику для системы, заданной в виде
![]() .
.
Р
е ш е н и е.
Весовая функция очевидно равна единице,
поскольку в данном случае согласно
(1.1.13)
![]() (при
t>0).
Передаточная функция и частотная
характеристика определятся как
(при
t>0).
Передаточная функция и частотная
характеристика определятся как
![]() ,
, ![]() .
.
Для получения представления ЧХ в виде (1.1.32) умножим и разделим на число, комплексно-сопряженное знаменателю, т.е.
![]() .
.
Отсюда следует, что выражения для амплитудно-частотной и фазочастотной характеристик могут быть записаны как (рис. 1.1.3)
![]() ,
,
![]() .
.
Графики этих функций представлены на рис. 1.1.6.
Рассматриваемая система представляет
собой обычный интегратор, при прохождении
через который амплитуда гармонического
сигнала уменьшается в
![]() раз, а фаза меняется на 90 градусов.
раз, а фаза меняется на 90 градусов.
Заметим, что весовая функция
![]() в рассматриваемом случае не является
абсолютно интегрируемой. Тем не менее,
учитывая связь преобразований Лапласа
и Фурье и тот факт, что
в рассматриваемом случае не является
абсолютно интегрируемой. Тем не менее,
учитывая связь преобразований Лапласа
и Фурье и тот факт, что
![]() при
при
![]() ,
нетрудно убедиться в том, что
,
нетрудно убедиться в том, что
![]() .
Таким образом, в рассматриваемом примере
ЧХ также может быть введена как
преобразование Фурье от этой функции.
.
Таким образом, в рассматриваемом примере
ЧХ также может быть введена как
преобразование Фурье от этой функции.
a)

б)
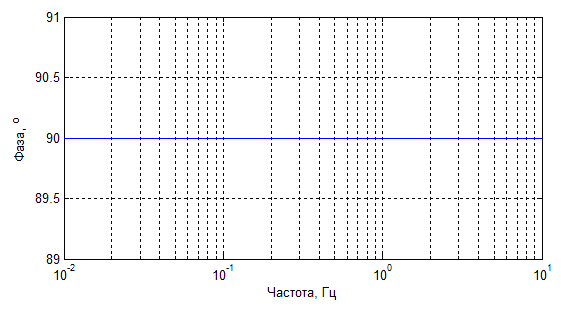
Рис. 1.1.6. Графики амплитудно-частотной (a) и фазочастотной характеристик (б)
Задача 1.1.6. Найдите ЧХ и весовую функцию для системы
![]()
Р е ш е н и е.
С учетом результатов
примера 1.1.4 легко получить ПФ в виде
![]() .
Таким образом,
.
Таким образом,
![]() .
Вычисляя обратное преобразование
Лапласа, получаем
.
Вычисляя обратное преобразование
Лапласа, получаем
![]() .
.
Поскольку
эта функция абсолютно интегрируема, то
преобразование Фурье для этой функции
с учетом того, что она отлична от нуля
только при
![]() ,
будет совпадать с выражением для ЧХ.
Нетрудно заметить, что рассматриваемое
уравнение соответствует случаю 4 из
примера П5 приложения 2, т.е.
,
будет совпадать с выражением для ЧХ.
Нетрудно заметить, что рассматриваемое
уравнение соответствует случаю 4 из
примера П5 приложения 2, т.е.
![]() (
(![]() ),
а
),
а
![]() ,
так что
,
так что
![]() ,
,
Таким
образом, в рассматриваемой системе
всегда присутствуют незатухающие
колебания. Например, при нулевом входном
воздействии и
![]() ,
,
![]() .
.
В общем случае такие колебания в двухмерной системе возникают всегда, когда матрица динамики системы может быть представлена как
![]() .
.
Уравнения, порождающие более сложные гармонические колебания, рассматриваются, например, в [41, 42].
Задача 1.1.7. Покажите, что коэффициенты ошибок могут быть получены с помощью следующего соотношения [87, с.119]
![]() ,
,
![]()
Р е ш е н и е. Дифференцируя соотношение (1.1.21), можем записать
![]() .
.
Отсюда вытекает
![]() ,
,
что и подтверждает справедливость (1.1.64).
Задача 1.1.8. Убедитесь в том, что для
системы с ПФ
![]() ,
при выполнении условий
,
,
при выполнении условий
,
![]() ,
система обладает астатизмом второго
порядка.
,
система обладает астатизмом второго
порядка.