Контрольные вопросы
Поясните смысл понятия lti-объект, используемого в Control System Toolbox Matlab.
Какие существуют формы представления линейных стационарных систем в Control System Toolbox Matlab?
Каким образом можно преобразовать одну форму представления lti-объекта в другую?
Какие функции в Control System Toolbox, позволяют исследовать реакцию линейных стационарных систем на изменение начальных условий и входные воздействия? Проиллюстрируйте их применение на примерах.
Приведите постановку задачи перехода от непрерывного описания динамической системы к ее дискретному аналогу.
Что такое экстраполятор нулевого порядка?
Какие функции в Matlab позволяют осуществлять переход от непрерывного описания системы к ее дискретному аналогу?
1.4. Задание для моделирования
с использованием Matlab
Для представленных ниже линейных стационарных динамических систем выполните следующее.
Приведите выражения для фундаментальной матрицы, передаточной функции и весовой матрицы, полагая
 .
.
Запишите выражение для эквивалентных дискретных систем с точностью до первого приближения при произвольном значении интервала дискретизации .
С помощью Control System Toolbox пакета Matlab сформируйте соответствующие lti-объекты. Зафиксируйте начальные условия и интервал времени.
Для выбранных условий постройте графики, иллюстрирующие реакцию систем на начальные условия с помощью функции initial; единичный скачок с помощью функции step; на дельта-функцию с помощью функции impulse.
Примечание: начальные условия, интервал времени и масштаб по оси ординат необходимо выбирать таким образом, чтобы на графиках можно было наблюдать характерные изменения соответствующих величин со временем.
Определите полюса и нули системы и их расположение с помощью функций pzmap, pole, tzero.
Проверьте правильность получения передаточных функций с помощью tfsys. Запишите аналитическое выражение для полученных функций.
В а р и а н т 1. Интеграторы
Интегратор первого порядка:
![]() ;
;
![]() .
.
Интегратор второго порядка:
Интегратор третьего порядка:
В а р и а н т 2. Фильтры Баттерворта
Фильтр Баттерворта второго порядка:
,
;
.
Фильтр Баттерворта третьего порядка:
,
![]() ,
,
![]() ;
;
.
В а р и а н т 3. Последовательно соединенные
апериодические звенья
первого порядка
Апериодическое звено первого порядка:
![]() ;
;
.
Апериодическое звено второго порядка:
![]()
.
Апериодическое звено третьего порядка:

.
В а р и а н т 4. Системы с незатухающими колебаниями
Генератор синусоидальных колебаний:
где
![]() – круговая частота, соответствующая
периоду колебаний.
– круговая частота, соответствующая
периоду колебаний.
Пример выполнения задания в Matlab
Фильтр Баттерворта второго порядка
Для этого варианта можно записать:
![]() ;
;
;
;
;
;
![]() .
.
Результат применения некоторых из описанных выше функций к этой системе представлен в табл. 1.4.1.
Т а б л и ц а 1.4.1
Результат применения некоторых функций для фильтра Баттерворта
второго порядка
Текст в рабочем поле |
Результат |
x0=[1;1]; sys=ss([0 1;-1 -sqrt(2)],[0;1],[1 0],0); |
Сформирован lti-объект в форме пространства состояния для модели (1.7.4)-(1.7.5) |
[A,B,C,D]=ssdata(sys) |
A = 0 1.0000 -1.0000 -1.4142 B = 0 1 C = 1 0 D = 0 |
tfsys=tf(sys) |
Transfer function 1 ----------------- s^2 + 1.414 s + 1 |
P=pole(sys) |
P = -0.7071 + 0.7071i -0.7071 – 0.7071i |
Z=tzero(sys) |
Z = Empty matrix: 0-by-1 |
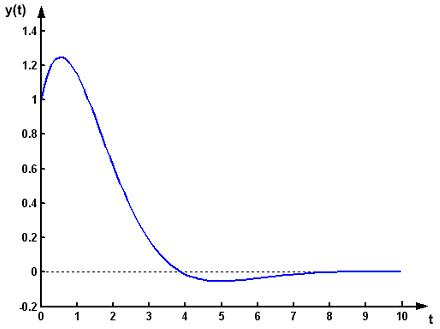
Реакция системы на начальные условия
x0=[1;1]; sys=ss([0 1;-1 -sqrt(2)],[0;1],[1 0],0);
initial(sys,x0,10);
Реакция системы на единичную функцию
sys=ss([0 1;-1 -sqrt(2)],[0;1],[1 0],0);
step(sys,10);

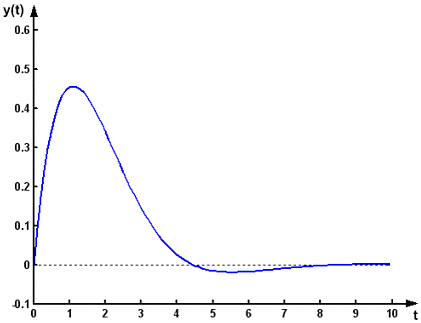
Реакция системы на дельта-функцию
sys=ss([0 1;-1 -sqrt(2)],[0;1],[1 0],0);
impulse(sys,10);