

1.1.2. Определение выхода линейных динамических систем с помощью фундаментальной матрицы и весовой функции
Пусть задана линейная динамическая система:
![]() ; (1.1.7)
; (1.1.7)
![]() , (1.1.8)
, (1.1.8)
в которой не разделяются входное
возмущение и управление и считается,
что задан некоторый входной сигнал
![]() ,
а ошибки измерения отсутствуют. Используя
выражение (П2.8), нетрудно записать
соотношение, связывающее выход системы
с ее входом
,
а ошибки измерения отсутствуют. Используя
выражение (П2.8), нетрудно записать
соотношение, связывающее выход системы
с ее входом
 , (1.1.9)
, (1.1.9)
в
котором
![]() – задаваемая с помощью соотношения
(П2.7) фундаментальная матрица для
уравнения (1.1.7). Таким образом, описание
выхода системы в этом случае осуществляется
по схеме: вход
– состояние – выход [41,
42].
– задаваемая с помощью соотношения
(П2.7) фундаментальная матрица для
уравнения (1.1.7). Таким образом, описание
выхода системы в этом случае осуществляется
по схеме: вход
– состояние – выход [41,
42].
Первое слагаемое, порожденное начальным условием, нередко называют свободным движением системы
![]() , (1.1.10)
, (1.1.10)
а второе
 , (1.1.11)
, (1.1.11)
порожденное входным воздействием, – вынужденным движением системы.
В случае если начальные условия нулевые, выход системы определяется как
 ,(1.1.12)
,(1.1.12)
где
![]() . (1.1.13)
. (1.1.13)
Функция
![]() ,
задаваемая этим соотношением называется
весовой
функцией или функцией веса
[7].
Такое название следует из того, что в
правой части последнего выражения
определяет в каждый момент времени на
интервале от
,
задаваемая этим соотношением называется
весовой
функцией или функцией веса
[7].
Такое название следует из того, что в
правой части последнего выражения
определяет в каждый момент времени на
интервале от
![]() до
уровень вклада входного воздействия в
выходной сигнал. В этом легко убедиться,
если, вводя интервал дискретизации
до
уровень вклада входного воздействия в
выходной сигнал. В этом легко убедиться,
если, вводя интервал дискретизации
![]() ,
записать приближенное представление
выходного сигнала
,
записать приближенное представление
выходного сигнала
![]() ,
где
,
где
![]() ,
,
![]() ,
,
![]() .
.
В
общем случае
представляет собой матрицу размерности
![]() ,
поэтому ее называют весовой
матрицей
[38].
В частном
случае, когда
,
поэтому ее называют весовой
матрицей
[38].
В частном
случае, когда
![]() и
и
![]() – единичные матрицы, весовая
функция и фундаментальная матрица между
собой совпадают.
– единичные матрицы, весовая
функция и фундаментальная матрица между
собой совпадают.
Рассмотрим теперь стационарную систему:
![]() ;
(1.1.14)
;
(1.1.14)
![]() . (1.1.15)
. (1.1.15)
Поскольку
фундаментальная матрица
![]() для этой системы зависит от разности
аргументов, то и весовая функция также
будет зависеть лишь от разности
аргументов, т.е.
для этой системы зависит от разности
аргументов, то и весовая функция также
будет зависеть лишь от разности
аргументов, т.е.
![]() ,
или при
,
или при
![]()
![]() . (1.1.16)
. (1.1.16)
В этом случае связь выхода стационарной системы с входным воздействием при нулевых начальных условиях будет определяться как
![]() . (1.1.17)
. (1.1.17)
Выражение
такого типа называется сверткой
функций, и
в данном
случае это функции
![]() и
и
![]() .
.
Заметим,
что для весовой функции используют
также термин – импульсная
переходная функция [26].
Это название объясняется следующим
образом. Пусть при нулевых начальных
условиях входной сигнал представляет
собой импульсное
входное воздействие – воздействие
в виде дельта-функции
![]() в момент
в момент
![]() по
по
![]() -му
входу и при нулевых входных воздействиях
по другим входам, т.е.
-му
входу и при нулевых входных воздействиях
по другим входам, т.е.
![]() .
.
Определим
![]() -й
выход системы. Для этого зададим матрицу
-й
выход системы. Для этого зададим матрицу
![]() ,
отсюда следует, что
,
отсюда следует, что
![]() ,
,
где
![]() –
–
![]() -й
элемент матрицы
-й
элемент матрицы
![]() [7,
с. 59].
[7,
с. 59].
Если
входное воздействие в виде дельта-функции
поступает в момент
![]() ,
т.е.
,
т.е.
![]() ,
то в соответствии со свойствами
дельта-функции выход системы примет
вид
,
то в соответствии со свойствами
дельта-функции выход системы примет
вид
![]() .
.
Таким образом, элемент представляет реакцию системы на -м выходе при импульсном входном воздействии в виде дельта-функции в начальный момент времени по -му входу при нулевых начальных условиях и нулевых входных воздействиях по другим входам.
Следует
заметить, что весовая
функция
![]() в выражении (1.1.17) отлична от нуля лишь
при значениях аргумента, больших либо
равных нулю, т.е.
в выражении (1.1.17) отлична от нуля лишь
при значениях аргумента, больших либо
равных нулю, т.е.
![]() при
при
![]() .
Это обусловлено тем, что весовая функция
(1.1.16) соответствует физически
реализуемой системе
(1.1.14) (иногда говорят о реализуемой
весовой функции
или системе
без упреждения),
т.е. системе, в которой при формировании
ее выходного сигнала (1.1.17) в текущий
момент времени используются значения
входного сигнала
.
Это обусловлено тем, что весовая функция
(1.1.16) соответствует физически
реализуемой системе
(1.1.14) (иногда говорят о реализуемой
весовой функции
или системе
без упреждения),
т.е. системе, в которой при формировании
ее выходного сигнала (1.1.17) в текущий
момент времени используются значения
входного сигнала
![]() только в предшествующие моменты времени
только в предшествующие моменты времени
![]() (рис. 1.1.1).
(рис. 1.1.1).

Рис. 1.1.1. Формирование
выходного сигнала
в физически-реализуемой
системе, т.е. при
![]()
В противоположность этому для физически
нереализуемой системы весовая функция
отлична от нуля и при отрицательных
значениях аргумента, т.е.![]() .
Следует заметить, что термин физически
нереализуемая система носит условный
характер, поскольку такая система на
самом деле реализуема. Речь идет лишь
о невозможности ее реализации в реальном
масштабе времени. В частности, для
рассматриваемых в дальнейшем устройств
оценивания это означает, что при получении
оценки в текущий момент времени
используются не только прошлые, но и
будущие измерения, что характерно при
решении задач сглаживания или интерполяции.
Эта ситуация поясняется на рис. 1.1.2.
.
Следует заметить, что термин физически
нереализуемая система носит условный
характер, поскольку такая система на
самом деле реализуема. Речь идет лишь
о невозможности ее реализации в реальном
масштабе времени. В частности, для
рассматриваемых в дальнейшем устройств
оценивания это означает, что при получении
оценки в текущий момент времени
используются не только прошлые, но и
будущие измерения, что характерно при
решении задач сглаживания или интерполяции.
Эта ситуация поясняется на рис. 1.1.2.

Рис. 1.1.2. Формирование
выходного сигнала
в физически
нереализуемой системе, т.е. при
![]()
Пример 1.1.1. Пусть система скалярная, и ее модель задана в виде:
![]() ;
;
![]() .
.
Приведем
выражения для весовой матрицы и с ее
помощью найдем выход системы в случае,
когда
![]() и
и
![]() .
.
Ясно,
что для этого примера
![]() ,
,
![]() ,
,
![]() .
Принимая во
внимание (1.1.13) и (П2.15), можем записать:
.
Принимая во
внимание (1.1.13) и (П2.15), можем записать:
![]() .
.
Рис. 1.1.3. График
весовой функции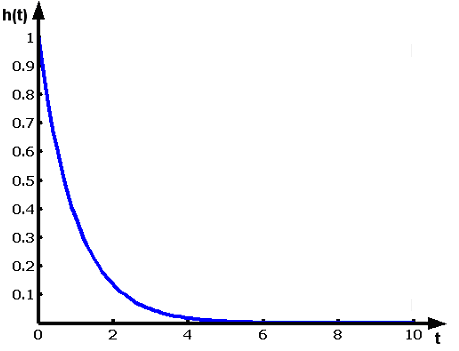
![]() и
и![]() для рассматриваемой системы изображен
на рис.1.1.3.
для рассматриваемой системы изображен
на рис.1.1.3.
Представим выход системы в виде суммы
![]() ,
,
в
которой первое слагаемое
![]() обусловлено начальным условием, а второе
– порождено входным воздействием.
обусловлено начальным условием, а второе
– порождено входным воздействием.
Принимая во внимание тот факт, что [14, с.118]
![]() ,
,
при получаем
![]()
![]() =
=
![]() .
.
Вводя
![]() ,
,
![]() ,
,
![]() ,
можем записать
,
можем записать
![]() ,
,
где
![]() .
.
Таким образом,
![]() .
.
Поскольку [Двайт, с.118]
![]() ,
,
при
![]() выход будет определяться как
выход будет определяться как
![]() .
.
Если параметр
![]() ,
то при
,
то при
![]() на выходе имеем только гармоническую
составляющую. То же самое будет при
любом
,
если
на выходе имеем только гармоническую
составляющую. То же самое будет при
любом
,
если
![]() .
.