

1.1.3. Передаточная функция стационарных линейных динамических систем
Передаточной
функцией
(ПФ) называется такая функция, которая
определяет связь выходного
![]() и входного
и входного
![]() изображений по
Лапласу при нулевых начальных условиях,
т.е.
изображений по
Лапласу при нулевых начальных условиях,
т.е.
![]() . (1.1.18)
. (1.1.18)
Заметим, что в общем случае это определение не предполагает введение понятия состояния, и выход системы описывается как функция от входа, т.е. в данном случае описание системы осуществляется по схеме вход – выход [41, 42]. В то же время, располагая представлением системы в виде (1.1.14), (1.1.15), можно легко получить выражение для ПФ. Действительно, используя представление (П2.23) для общего решения при нулевых начальных условиях, можем записать выражение, связывающее входное и выходное изображения
![]() . (1.1.19)
. (1.1.19)
Таким образом, для ПФ получаем
![]() . (1.1.20)
. (1.1.20)
Сопоставляя (1.1.17) и (1.1.18), с учетом теоремы о свертке (см. приложение 2) нетрудно заметить, что передаточная функция представляет собой преобразование Лапласа от весовой функции , т.е.
![]() , (1.1.21)
, (1.1.21)
и соответственно, весовая функция
стационарной системы может рассматриваться
как оригинал от ПФ. В общем случае ПФ,
так же, как и весовая функция, является
матрицей, элементы которой
![]() определяют
ПФ, устанавливающую связь между
определяют
ПФ, устанавливающую связь между
![]() -м
входом и
-м
входом и
![]() -м
выходом. Каждый элемент такой матрицы
может быть представлен в виде отношений
двух полиномов. В частности, для системы
с одним входом и одним выходом можно
записать следующее представление:
-м
выходом. Каждый элемент такой матрицы
может быть представлен в виде отношений
двух полиномов. В частности, для системы
с одним входом и одним выходом можно
записать следующее представление:
 , (1.1.22)
, (1.1.22)
где коэффициенты полинома,
стоящего в знаменателе,
совпадают с коэффициентами
характеристического
многочлена матрицы
F,
определяемым как
![]() .
Такой вид ПФ следует из (1.1.20) и правила
определения обратной матрицы (П1.1.21),
приведенного в [73].
.
Такой вид ПФ следует из (1.1.20) и правила
определения обратной матрицы (П1.1.21),
приведенного в [73].
Заметим, что наряду с представлением (1.1.22) ПФ может быть задана и в виде
![]() , (1.1.23)
, (1.1.23)
где
![]() –
обобщенный коэффициент передачи
системы, а
–
обобщенный коэффициент передачи
системы, а
![]() ,
,
![]() – корни полиномов, называемые нулями
и полюсами системы.
– корни полиномов, называемые нулями
и полюсами системы.
Пример
1.1.2. Найдем
ПФ для системы из примера 1.1.1 и определим
с ее помощью реакцию системы на входной
единичный скачок
![]() при нулевых начальных условиях.
при нулевых начальных условиях.
ПФ в этом случае имеет вид
![]() . (1.1.24)
. (1.1.24)
Используя (1.1.18) и табл. П1.2, запишем
![]() .
.
Отсюда получаем
![]() .
.
Пример графика, иллюстрирующего реакцию системы с ПФ (1.1.24) на входной единичный скачок при и , представлен на рис. 1.1.4.
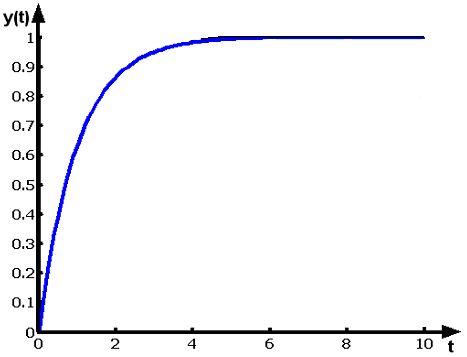
Рис. 1.1.4. Реакция системы с ПФ (1.1.24) на входной единичный скачок
Система с ПФ
(1.1.24) в классической теории автоматического
управления называется апериодическим
звеном первого порядка.
Величина
![]() называется постоянной
времени.
Такое название объясняется тем, что с
ее помощью можно оценить время
переходного процесса, за
которое при
называется постоянной
времени.
Такое название объясняется тем, что с
ее помощью можно оценить время
переходного процесса, за
которое при
![]() ,
,
![]() и
и
![]() решение
решение
![]() становится существенно меньшим
становится существенно меньшим
![]() .
Так, при
и
получаем
.
Так, при
и
получаем
![]() ,
а
,
а
![]() .
Обычно это
время оценивается на уровне
(3-5)T.
.
Обычно это
время оценивается на уровне
(3-5)T.
Поскольку в общем случае описание
системы с помощью ПФ может быть и не
связано с ее представлением в виде
(1.1.14), (1.1.15), важно оговорить, что степень
числителя в (1.1.22) должна быть меньше
степени знаменателя, т.е.
![]() .
Если
.
Если
![]() ,
то в выражении для ПФ можно выделить
составляющие
,
то в выражении для ПФ можно выделить
составляющие
![]() ,
,
![]() .
Их наличие, в свою очередь порождает
наличие разрывных (физически неосуществимых)
составляющих в весовой функции
,
поскольку эта функция есть оригинал от
ПФ (табл. П1.2). К примеру, при
.
Их наличие, в свою очередь порождает
наличие разрывных (физически неосуществимых)
составляющих в весовой функции
,
поскольку эта функция есть оригинал от
ПФ (табл. П1.2). К примеру, при
![]() ,
содержит дельта функцию. Системы такого
типа называются физически
неосуществимыми [87,
c.107].
,
содержит дельта функцию. Системы такого
типа называются физически
неосуществимыми [87,
c.107].
З а м е ч а н и е. Несмотря на то что при определении ПФ начальные условия предполагаются нулевыми, ясно, что, применяя преобразование Лапласа к уравнениям (1.1.14), (1.1.15), можно получить преобразование Лапласа для выходного сигнала с учетом ненулевых начальных условий.
Действительно, с учетом правил
дифференцирования оригинала, приведенного
в табл. П1.2, можем записать
![]() .
.