

20. Удельная эоп объемно и поверхностно распределенных отражателей.
Удельная ЭОП объемно распределенных отражателей
При работе РЛС могут иметь место мешающие отражения от облаков, состоящих из:
отражателей естественного (гидрометеоры – дождевые, снеговые, градовые облака, идущий снег, дождь, град) происхождения;
отражателей искусственного (облака дипольных отражателей) происхождения.
Эти отражения называются пассивными помехами.
Количественно отражающая способность
таких объемных образований характеризуется
удельной ЭОП
 ,
равной среднему значению ЭОП одного
кубического метра облака.
,
равной среднему значению ЭОП одного
кубического метра облака.
Удельная ЭОП гидрометеоров достаточно хорошо изучена, а ее значения для различных ситуаций представлены в справочниках по радиолокации. Поэтому обратим внимание на образования из дипольных отражателей.
Дипольный отражатель представляет
собой полуволновой вибратор, выполненный
из металлизированной бумаги,
металлизированного стекловолокна,
алюминиевой фольги, нейлонового волокна,
покрытого серебром и других материалов.
Его максимальная ЭОП составляет величину
 .
С учетом случайной ориентации вибратора
его средняя ЭОП
.
С учетом случайной ориентации вибратора
его средняя ЭОП
 .
.
Удельная ЭОП облака диполей - полуволновых вибраторов описывается выражением:
 ,
,
где
 − число пачек диполей в облаке;
− число пачек диполей в облаке;
 − число диполей в одной пачке;
− число диполей в одной пачке;
 − коэффициент слипания диполей;
− коэффициент слипания диполей;
 − объем облака.
− объем облака.
Удельная ЭОП поверхностно распределенных отражателей.
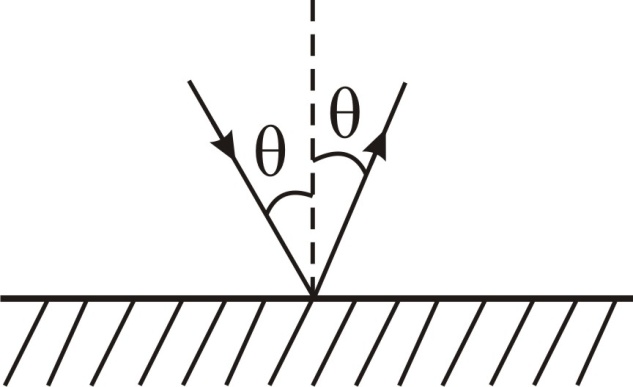
К поверхностно распределенным отражателям относятся участки земной и водной поверхности. Их вторичное отражение может быть зеркальным и диффузным.
Для зеркального отражения угол падения равен углу отражения (рис. 9).
Рис. 9 |
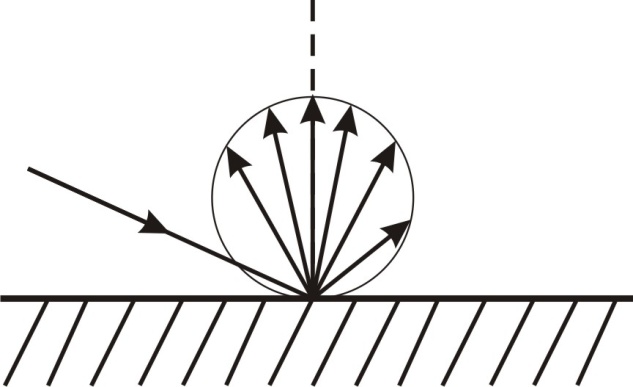
Рис. 10 |
Критерий гладкой поверхности (при этом отражение является зеркальным), сформулированный Релеем, имеет вид:
 ,
,
где
 − высота неровностей;
− угол скольжения.
− высота неровностей;
− угол скольжения.
Видно, что при малых углах скольжения даже весьма неровные поверхности могут считаться гладкими.
Диффузное отражение имеет место для шероховатых (негладких) поверхностей. В таком случае диаграмма обратного вторичного излучения имеет вид, представленный на рисунке 10.
Количественно отражательная способность
совокупностей поверхностно распределенных
отражателей характеризуется удельной
ЭОП этих отражателей на
 площади, то есть
площади, то есть
 ,
,
 .
.
21. Модель временной структуры отраженного сигнала.
В качестве модели временной структуры
ОС от сосредоточенной цели в большинстве
случаев рассматривают временную
структуры суммы отражающих сигналов
от областей локального отражения цели:
 .
.
Отраженный сигнал от
 -ой
области локального отражения, расположенной
на расстоянии
-ой
области локального отражения, расположенной
на расстоянии
 от РЛС и движущейся с радиальной скоростью
цели
от РЛС и движущейся с радиальной скоростью
цели
 :
:
сохраняет внутрипериодную структуру ЗС;
запаздывает во времени на
 ;
;
смещён по частоте на
 ;
;
имеет изменяющиеся во времени амплитуду
 и фазу
и фазу
 .
.
Этот отраженный сигнал имеет вид:
 ,
,
где
 ,
,
 − огибающая последовательности одиночных
ОС от
-ой
области локального отражения и время
её запаздывания относительно начала
периода просмотра зоны действия РЛС.
− огибающая последовательности одиночных
ОС от
-ой
области локального отражения и время
её запаздывания относительно начала
периода просмотра зоны действия РЛС.
Огибающая
 в общем случае отличается от огибающей
ЗС
в общем случае отличается от огибающей
ЗС
 как по форме, так и по длительности, т.к.
определяется характером обзора по
угловым координатам.
как по форме, так и по длительности, т.к.
определяется характером обзора по
угловым координатам.
Радиальный
и угловые
 ,
,
 размеры реальной сосредоточенной цели
намного меньше размеров разрешающей
способности по дальности и угловым
координатам
размеры реальной сосредоточенной цели
намного меньше размеров разрешающей
способности по дальности и угловым
координатам
 .
.
Это означает, что максимальная разность
времен запаздывания ОС от областей
локального отражения
 намного меньше ширины основного
лепестка функции рассогласования ЗС
по времени
намного меньше ширины основного
лепестка функции рассогласования ЗС
по времени
 ,
определяющего разрешающую способность
по дальности
,
определяющего разрешающую способность
по дальности
 ,
а максимальная разность времен
запаздывания огибающих ОС от областей
локального отражения
,
а максимальная разность времен
запаздывания огибающих ОС от областей
локального отражения
 относительно начала просмотра сектора
обзора намного меньше её длительности
относительно начала просмотра сектора
обзора намного меньше её длительности
 .
.
В таких случаях можно пренебречь “размыванием” закона модуляции ЗС в одиночном ОС от реальной сосредоточенной цели и “размыванием” огибающей последовательности одиночных ОС от областей локального отражения в процессе их “объединения” в результирующей ОС.
При этом полагается, что
 ,
а временная структура описывается
выражением
,
а временная структура описывается
выражением

 ,
,
где
 − закон модуляции ОС;
− закон модуляции ОС;
 ,
,
 − квадратурные составляющие ОС;
− квадратурные составляющие ОС;
 − комплексные, амплитудные и фазовые
флуктуации ОС.
− комплексные, амплитудные и фазовые
флуктуации ОС.
В геометрической интерпретации ОС −
это вектор длиной
 с текущем угловым положением
с текущем угловым положением
 ,
а квадратурные составляющие ОС − это
проекции вектора ОС на оси прямоугольной
системы координат.
,
а квадратурные составляющие ОС − это
проекции вектора ОС на оси прямоугольной
системы координат.