50. Обзор по дальности при фильтровой обработке принятого сигнала.
Структура обнаружителя целей, осуществляющего обзор по дальности, во многом зависит от способа обработки принятого сигнала.
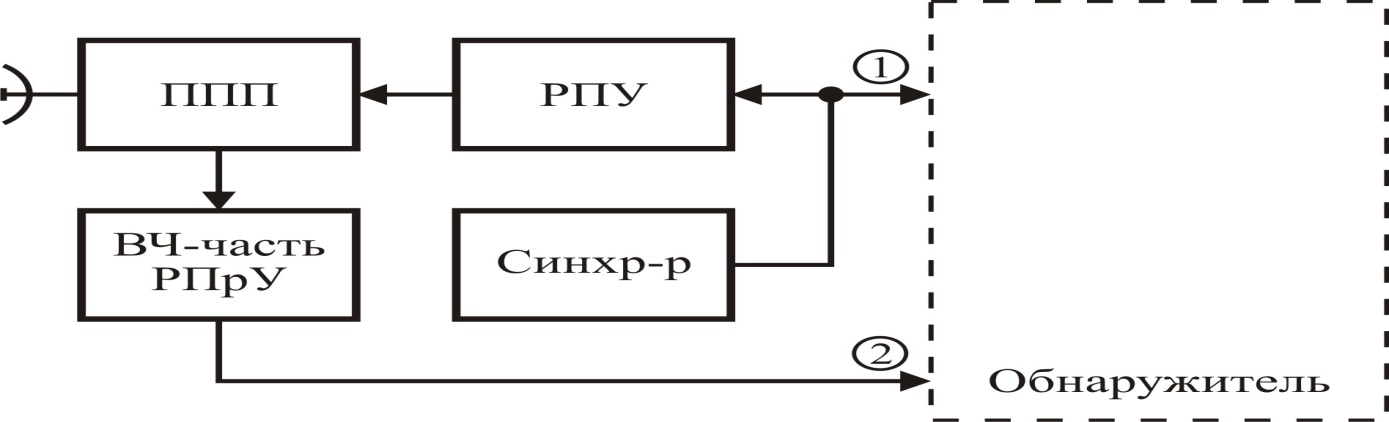
Устройство ФО инвариантно к времени задержки отраженного сигнала и имеет вид:
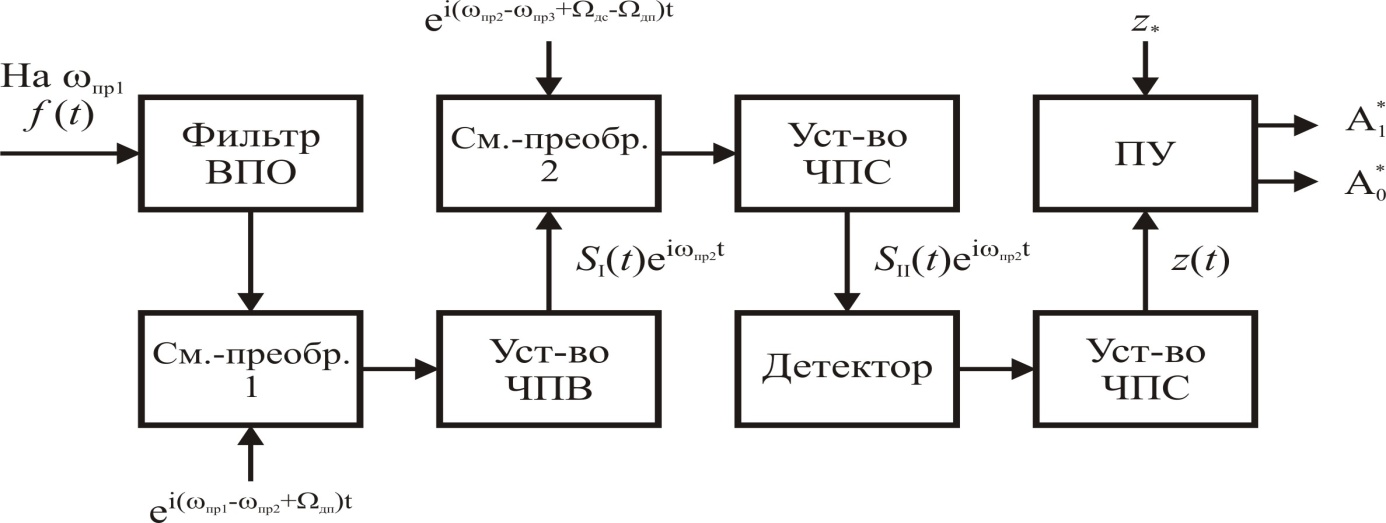
Рис. 1
Устройство осуществляет совместную
обработку отраженных сигналов от всех
целей, расположенных вдоль радиальной
протяженности зоны действия РЛС, а
выходной сигнал
 в каждом периоде повторения отражает
распределение целей по дальности:
в каждом периоде повторения отражает
распределение целей по дальности:
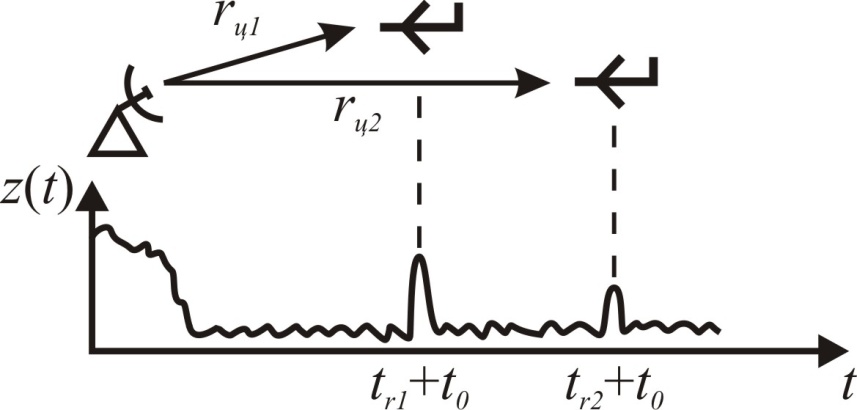
Рис. 2
Устройство имеет в своем составе:
− набор
 селекторов, работающих по коротким
селектирующим импульсам с рассовмещением
по времени задержи
селекторов, работающих по коротким
селектирующим импульсам с рассовмещением
по времени задержи
 ;
;
− набор пороговых устройств;
− набор
смеси принятия решения по критерию “
из
 ”;
”;
− устройство оценки дальности, соответствующей номеру канала, в котором обнаружена цель.

Рис. 3
Устройство автоматического принятия решения имеет вид: (здесь нет ЧПС после детектирования, а реализован способ “ из ”).

Рис. 4
Максимальное число просматриваемых
элементов разрешения по дальности
 соответствует интервалу однозначного
измерения дальности
соответствует интервалу однозначного
измерения дальности
 и равно:
и равно:
 .
.
Принятие решения в системе “оператор-индикатор” осуществляется оператором, который анализирует распределение отметок на линейной развертке(например, индикатора дальности или ИКО), осуществляет обнаружение целей и производит оценку их дальностей. Вид индикатора дальности:

52. Обзор по дальности при корреляционной обработке принятого сигнала.
Корреляционная обработка неинвариантная к дальности. Одноканальное устройство корреляционной обработки имеет вид:
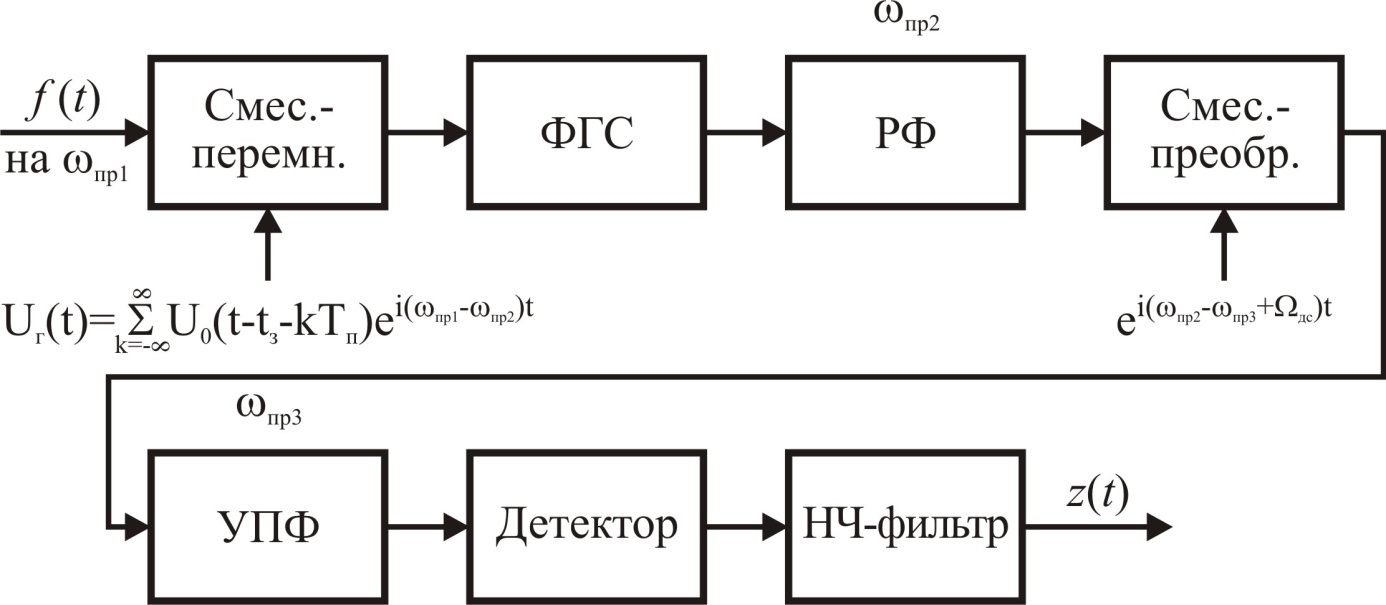
Рис. 7
Устройство обеспечивает выделение
отраженного сигнала с временем задержки
,
равным времени задержки опорного сигнала
 ,
то есть цели на дальности
,
то есть цели на дальности
 .
.
Для реализации одновременного обзора по в пределах интервала однозначного измерения дальности необходимо иметь таких устройств обработки, отличающихся временем задержки опорного сигнала .
Корреляционная обработка обычно осуществляется в РЛС с непрерывным или квазинепрерывным зондирующим сигналом. Схема обнаружителя РЛС с непрерывным ЗС, реализующего одновременный корреляционный обзор по , имеет вид:
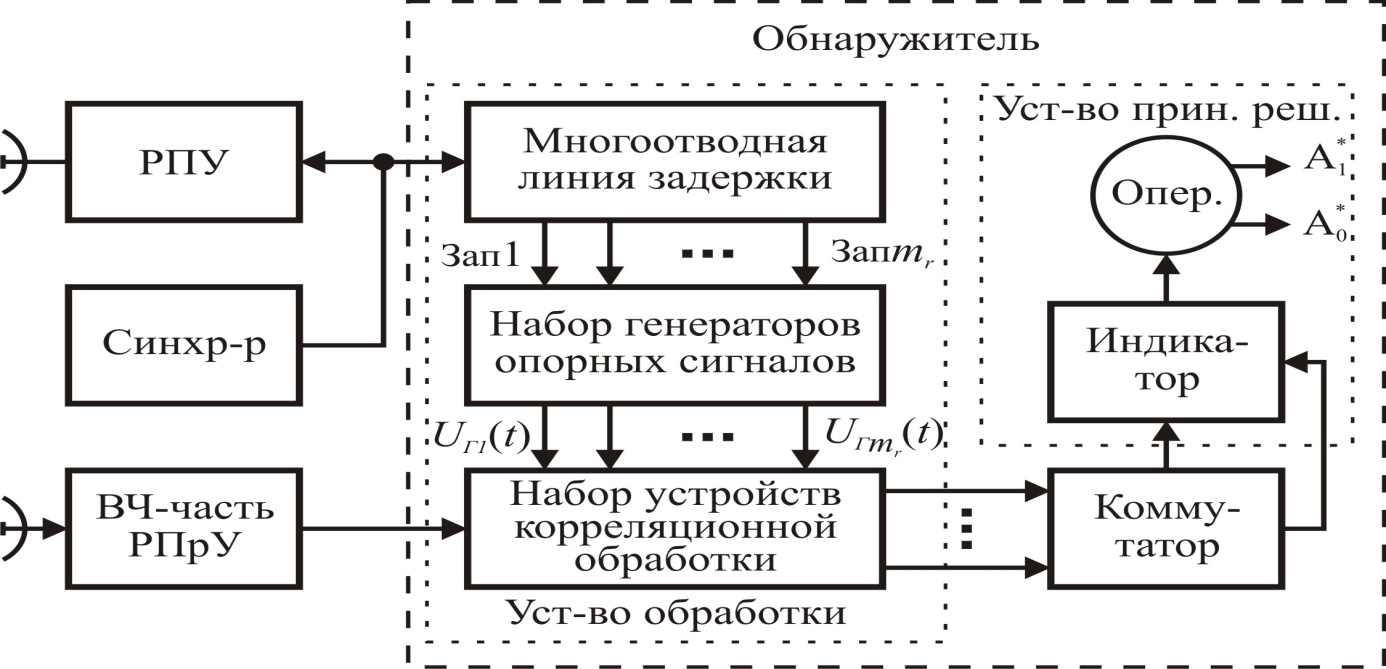
Рис. 8
Устные комментарии: Набор устройств
корреляционной обработки в обнаружителе
обслуживается
− канальным генератором опорных
сигналов, которые рассовмещены по
времени на интервале
 .
Максимальная величина
.
Максимальная величина
 .
Синхронизация каналов генератора
осуществляется с помощью многоотводной
линии задержки.
.
Синхронизация каналов генератора
осуществляется с помощью многоотводной
линии задержки.
Выходные сигналы каналов обработки поочередно коммутируются коммутатором к сигнальному входу индикатора. В результате за каждым каналом устройства обработки “закрепляется” определённый участок развертки дальности индикатора, соответствующий времени задержки опорного сигнала . Выходной сигнал канала устройства обработки создает яркостную отметку на экране индикатора, по которой оператор принимает решение.
Аналогичная структуру будет иметь и КО для КНРЛС.
Если решение о наличии цели должно приниматься автоматически, то выходные сигналы каналов обработки с выхода коммутатора подаются на пороговое устройство. Скорость опроса каналов высока и временем опроса можно пренебречь.
Обзор по дальности может осуществляться
последовательно с помощью одноканального
устройства корреляционной обработки,
в котором время задержки опорного
сигнала последовательно меняется в
пределах от
 до
до
 (как правило,
(как правило,
 (РПрУ закрыто на время зондирования), а
(РПрУ закрыто на время зондирования), а
 ).
).
Схема непрерывной РЛС с последовательным обзором по дальности имеет вид:
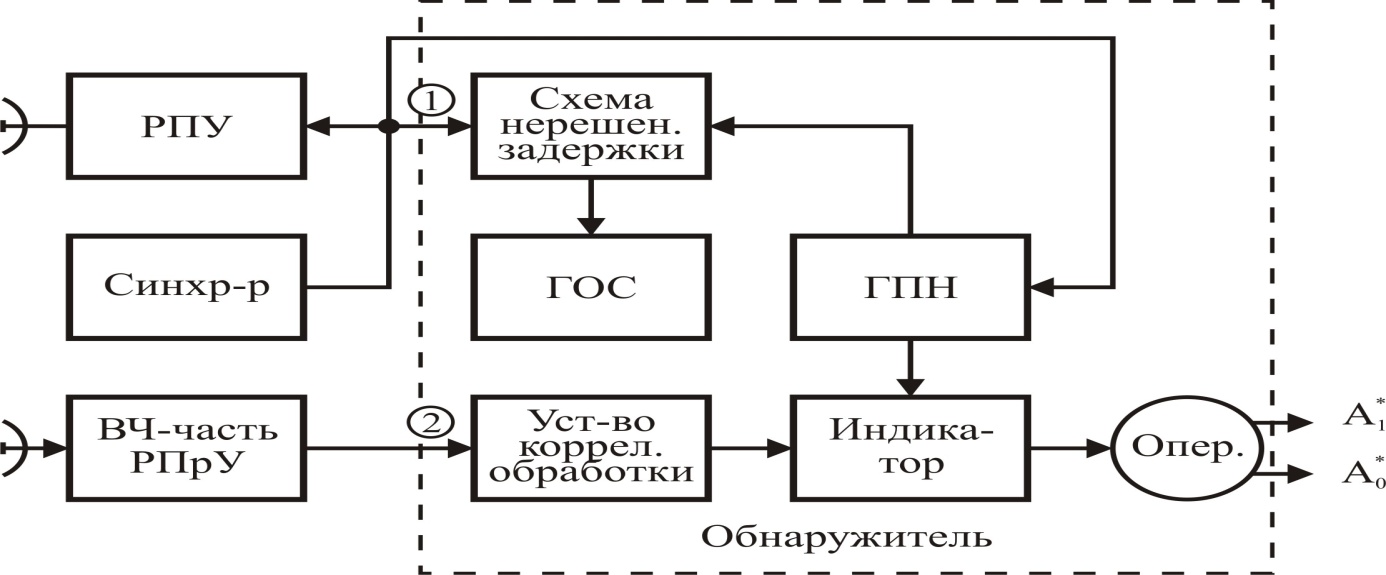
Отличие для квазинепрерывной РЛС: