

53. Одновременный обзор по радиальной скорости.
Одноканальное устройство корреляционной
или фильтровой обработки принятого
сигнала обеспечивает выделение из смеси
с фоном ОС от цели, движущейся с такой
,
которой с точностью до протяженности
элемента разрешения соответствует
частота настройки этого устройства.
Изменение частоты настройки корреляционного
устройства обработки осуществляется
путем изменения частоты коррекции
 опорного канала смесителя − преобразователя,
стоящего перед узкополосным фильтром
(рис. 3) или путём изменения частоты
настройки узкополосного фильтра
коррелятора (рис. 4):
опорного канала смесителя − преобразователя,
стоящего перед узкополосным фильтром
(рис. 3) или путём изменения частоты
настройки узкополосного фильтра
коррелятора (рис. 4):
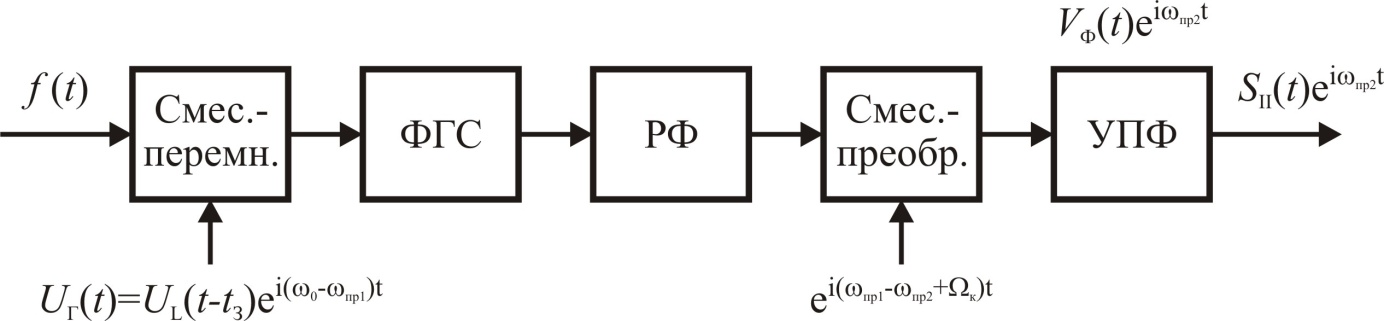
Рис. 3

Рис. 4
Перестройка по частоте фильтрового устройства обработки производится в основном за счёт изменения опорного сигнала смесителя или фазовых детекторов:
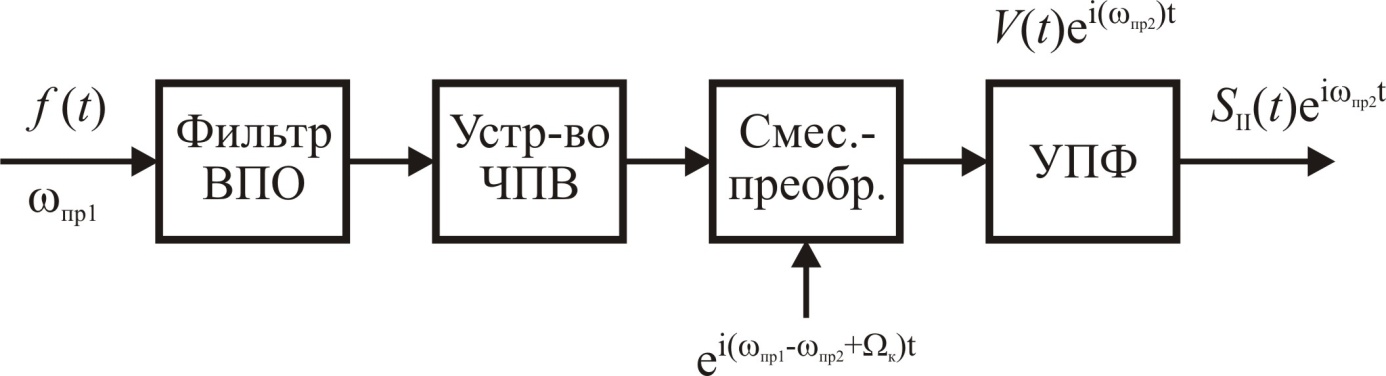
Рис. 5
Для осуществления одновременного обзора
по
в пределах зоны действия РЛС необходимо
иметь устройств обработки принятого сигнала,
расстроенных по частоте на ширину зубца
устройств обработки принятого сигнала,
расстроенных по частоте на ширину зубца
 АЧХ когерентного накопителя. Одновременный
обзор обычно реализуется в РЛС с
непрерывным или квазинепрерывным
зондирующим сигналом, в которых, как
правило, осуществляется корреляционная
обработка принятого сигнала и
измеряется однозначно. Схема канала
обнаружения, использующегося как в
непрерывных, так и квазинепрерывных
РЛС, реализующего одновременный обзор
по
при корреляционной обработке принятого
сигнала в одном элементе разрешения по
дальности, имеет вид:
АЧХ когерентного накопителя. Одновременный
обзор обычно реализуется в РЛС с
непрерывным или квазинепрерывным
зондирующим сигналом, в которых, как
правило, осуществляется корреляционная
обработка принятого сигнала и
измеряется однозначно. Схема канала
обнаружения, использующегося как в
непрерывных, так и квазинепрерывных
РЛС, реализующего одновременный обзор
по
при корреляционной обработке принятого
сигнала в одном элементе разрешения по
дальности, имеет вид:
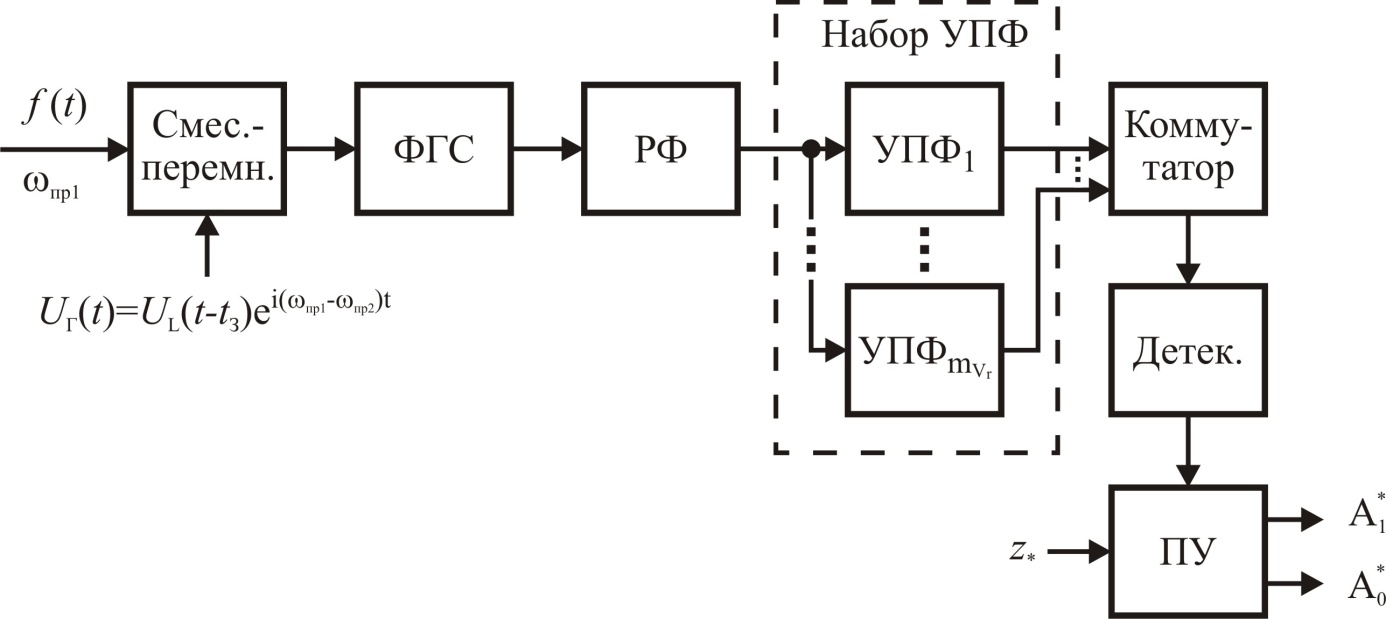
Рис. 6
Узкополосные фильтры расстроены по
частоте на интервал, равный ширине зубца
АЧХ когерентного накопителя
 .
.
54. Последовательный обзор по радиальной скорости.
Последовательный обзор по
может
осуществляться с использованием
одноканального устройства обработки,
частота настройки которого изменяется
последовательно в интервале от
 до
до
 или с учетом ширины зоны режекции
или с учетом ширины зоны режекции
 устройства когерентной компенсации МО
и интервала однозначного измерения
частоты Доплера ОС
устройства когерентной компенсации МО
и интервала однозначного измерения
частоты Доплера ОС
 (скорости) − от
до
.
Схема обнаружителя квазинепрерывной
РЛС с последовательным обзором по
скорости при корреляционной обработке
принятого сигнала имеет вид:
(скорости) − от
до
.
Схема обнаружителя квазинепрерывной
РЛС с последовательным обзором по
скорости при корреляционной обработке
принятого сигнала имеет вид:
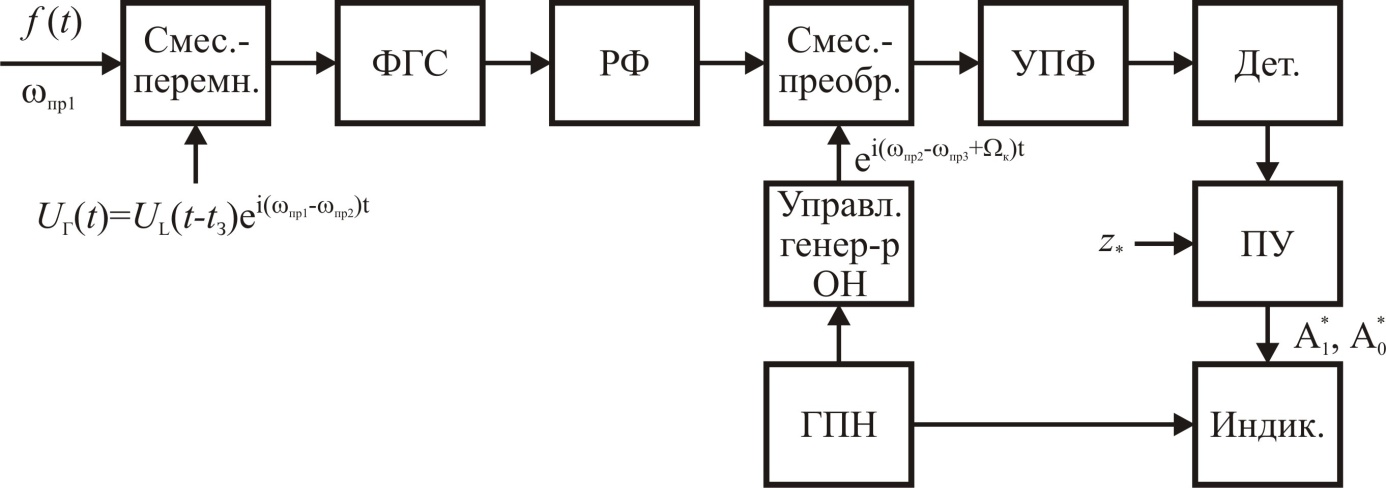
Рис. 7
Частота настройки когерентного накопителя меняется по пилообразному закону в оговоренных ранее пределах под действием напряжения, выработанного ГПН. При этом синхронно перемещается луч ЭЛТ, отображая отметки обнаруженных в ПУ целей.
Время последовательного обзора в раз больше, чем время одновременного обзора по .
55. Совместный обзор по дальности и радиальной скорости.
Совместный обзор по радиальной дальности
и радиальной скорости
на интервалах однозначной оценки
 может производится одновременно,
последовательно или путем комбинации
одновременного и последовательного
обзора по
и
.
может производится одновременно,
последовательно или путем комбинации
одновременного и последовательного
обзора по
и
.
При корреляционной обработке принятого
сигнала совместный обзор по
и
может производится одновременно в
устройстве имеющем
 корреляторов, в каждом из которых имеется
корреляторов, в каждом из которых имеется
 УПФ, рассовмещённых по
и
,
или последовательно с помощью
одноканального устройства путём
последовательного изменения параметров
и
опорных сигналов коррелятора.
УПФ, рассовмещённых по
и
,
или последовательно с помощью
одноканального устройства путём
последовательного изменения параметров
и
опорных сигналов коррелятора.
Схема обнаружителя квазинепрерывной РЛС с одновременным обзором по и имеет вид:
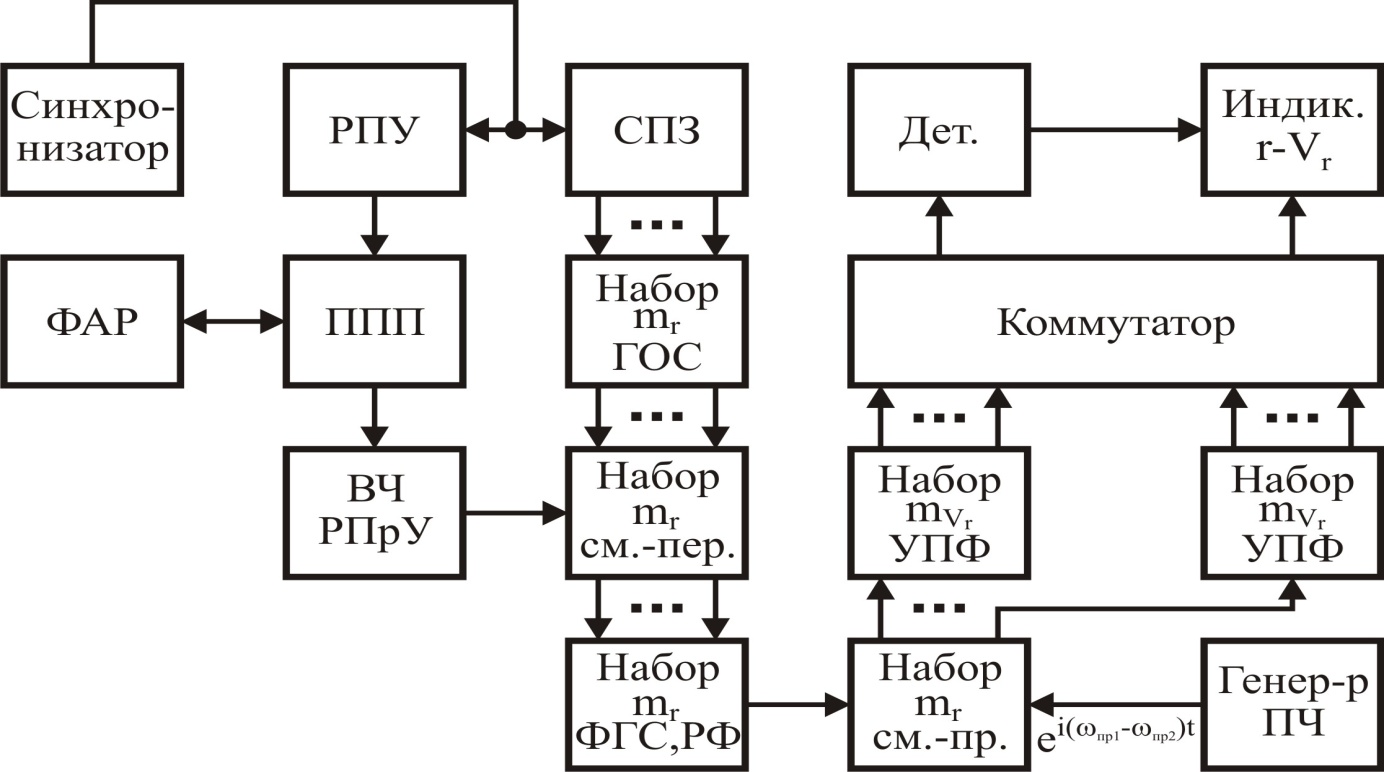
Для отображения результатов обзора используется двумерный индикатор с прямоугольной растровой разверткой "дальность-скорость".
Для каждого элемента разрешения по на экране этого индикатора предусмотрена отдельная развертка скорости , которая условно разделена между элементами разрешения по . С помощью коммутатора выходы наборов узкополосных фильтров подключаются последовательно через детектор к сигнальному входу индикатора. Причем вначале опрашивается набор УПФ первого коррелятора, соответствующего первому элементу разрешения по дальности, затем набор УПФ второго коррелятора, соответствующего второму элементу разрешения по дальности, и т.д.
Переход к угловым координатам.
С меньшими аппаратурными затратами реализуются совместные обзоры по и , сочетающий одновременный и последовательный обзоры. Схема обнаружителя непрерывной РЛС, в которой осуществляет последовательный обзор по на интервале однозначной оценки и одновременный обзор по при корреляционной обработке принятого сигнала, имеет вид:
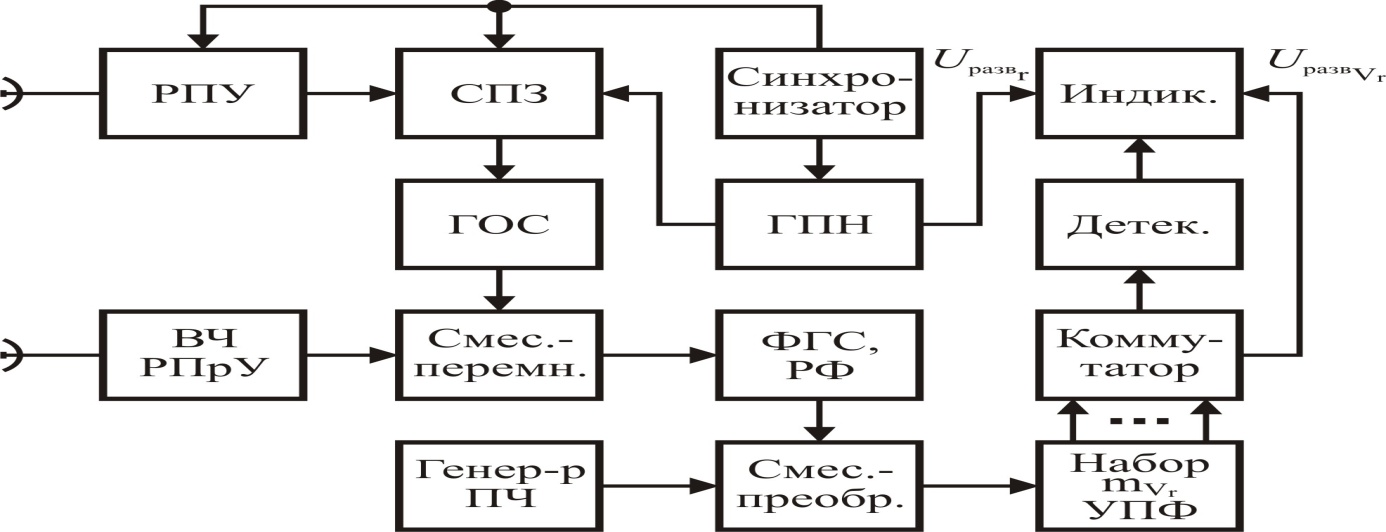
В этом обнаружителе ГПН формирует
пилообразное напряжение длительностью
 .
В соответствии с этим напряжением по
сигналам синхронизатора на выходе схемы
переменной задержки формируется
запускающие импульсы для генератора
ОС, следующие с интервалом
.
В соответствии с этим напряжением по
сигналам синхронизатора на выходе схемы
переменной задержки формируется
запускающие импульсы для генератора
ОС, следующие с интервалом
 .
По каждому из этих импульсов в ГОС
формируется последовательность опорных
сигналов
.
По каждому из этих импульсов в ГОС
формируется последовательность опорных
сигналов
 ,
соответствующих просматриваемому
элементу разрешения по дальности.
Следующая последовательность опорных
сигналов будет сдвинута на интервал
,
соответствующих просматриваемому
элементу разрешения по дальности.
Следующая последовательность опорных
сигналов будет сдвинута на интервал
 ,
т.е.
,
т.е.
 .
.
Радиоканальным является многоэтапный
совместный обзор по
и
,
на 1-ом этапе которого обнаружитель
работает с низкими разрешающими
способностями по
и
 (это обеспечивает малое число элементов
в разрешающей зоне обзора), а на 2-ом
этапе, используя более сложный зондирующий
сигнал, в обнаружителе устанавливаются
высокие разрешающие способности
(это обеспечивает малое число элементов
в разрешающей зоне обзора), а на 2-ом
этапе, используя более сложный зондирующий
сигнал, в обнаружителе устанавливаются
высокие разрешающие способности
 ,
,
 и производится уточнение местоположения,
скорости и состава обнаруженных на 1-ом
этапе целей.
и производится уточнение местоположения,
скорости и состава обнаруженных на 1-ом
этапе целей.
Совместный обзор по
и
на интервалах, превышающих интервалы
однозначного измерения, требует
устранения неоднозначности получаемых
оценок В импульсных РЛС, имеющих низкие
частоты повторения, такая неоднозначность
возникает при оценке радиальных скоростей
целей. В непрерывных и квазинепрерывных
РЛС с малым периодом повторения
зондирующих сигналов возникает
неоднозначность в оценке
.
В основе способов устранения неоднозначности
в оценке
.
В основе способов устранения неоднозначности
в оценке
лежит использование зондирующих сигналов
с переменным периодом повторения (так
называемый нониусный метод, используемый
в штангельциркуле). девиация периода
повторения должна выбираться из
условия: .
.