

30. Алгоритм работы и структура обнаружителя
2.1. Алгоритм работы обнаружителя для дискретного представления входного сигнала
Дискретное представление входного сигнала характерно для цифровой обработки, когда аналого-цифровой преобразователь формирует дискретные отсчеты принятого сигнала с некоторым интервалом дискретизации, соответствующим частоте дискретизации по времени.
На вход обнаружителя поступает принятый
сигнал
 ,
который представляет собой:
,
который представляет собой:
− при наличии цели аддитивную смесь
отраженного сигнала
 и радиационного фона
и радиационного фона
 ,
то есть
,
то есть
 ;
;
− при отсутствии цели только
радициолокационный фон
 .
.
Принятый сигнал является случайным
процессом, и его дискретная реализация
 характеризуется многомерной плотностью
вероятности
характеризуется многомерной плотностью
вероятности
 при условии
при условии
 ;
;
 при условии
при условии
 .
.
Саму дискретную реализацию можно
рассматривать как точку в
 -мерном
пространстве. Это позволяет представить
задачу синтеза оптимального обнаружителя
как задачу разбиения
-мерного
пространства на две области
-мерном
пространстве. Это позволяет представить
задачу синтеза оптимального обнаружителя
как задачу разбиения
-мерного
пространства на две области
 и
и
 .
При этом процедура обнаружения будет
заключаться в выяснении факта − в какую
область
-мерного
пространства попадает точка − реализация
.
При этом процедура обнаружения будет
заключаться в выяснении факта − в какую
область
-мерного
пространства попадает точка − реализация
 :
:
− при попадании в область
принимается решение
 ;
;
− при попадании в область
принимается решение
 ;
;
Заметим, что разбиение
-мерного
пространства на области
и
необходимо осуществить таким образом,
чтобы минимизировать средний риск
 .
.
В соответствии с такой интерпретацией выражения для условных вероятностей правильного обнаружения и ложной тревоги имеют вид:
 ,
,
 .
.
С учетом этого средний риск описывается выражением:

Видим, что слагаемые вне интеграла от выбора областей и не зависят, а значит и в минимизации среднего риска не участвуют. Следовательно, для того, чтобы был минимальным, подынтегральное выражение в каждой точке и должно быть меньше либо равно нулю:
 .
.
Геометрически это можно интерпретировать в виде:
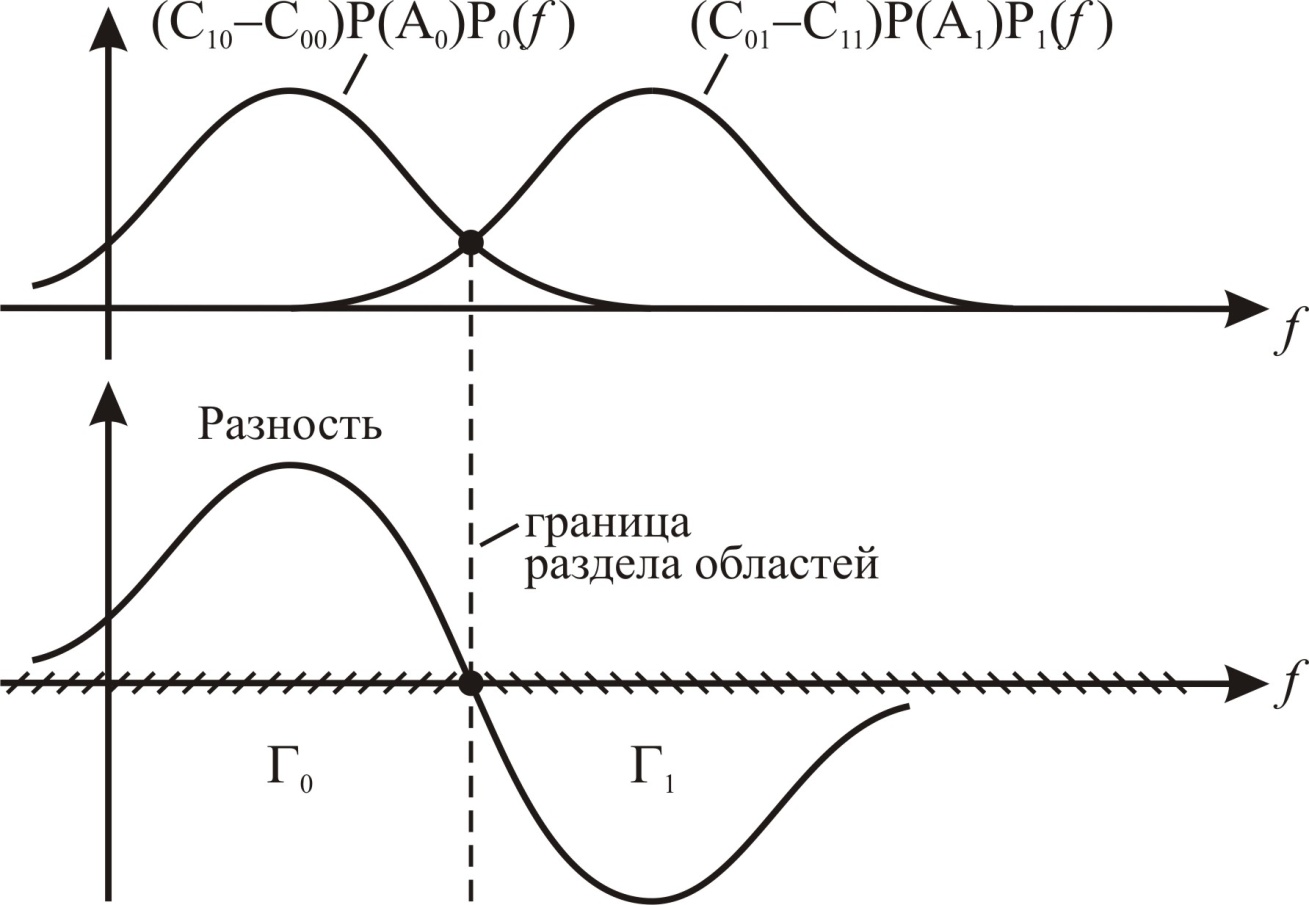
Рис. 2
Таким образом, граница проведена исходя из условия минимума . Следовательно, обнаружитель должен провести анализ − в какую область попадает выборка принятого сигнала :
если попала в область , то принимается решение ;
если попала в область , то − .
Для проведения анализа обнаружитель должен для полученной выборки установить следующее:
если
 ,
то
;
,
то
;
если
 ,
то −
.
,
то −
.
Исходя из этого можно записать правило обнаружения, по которому должен работать обнаружитель:
“если то
 ,
то
,
а если
,
то
,
а если
 ,
то
,”
,
то
,”
где
 − отношение правдоподобия, формируемое
обнаружителем по принятому сигналу
− отношение правдоподобия, формируемое
обнаружителем по принятому сигналу
 ;
;
 − порог обнаружителя.
− порог обнаружителя.
Следовательно, обнаружитель должен
формировать отношение правдоподобия
 и сравнивать его с порогом
и сравнивать его с порогом
 .
Структура обнаружителя представлена
на рисунке 3.
.
Структура обнаружителя представлена
на рисунке 3.
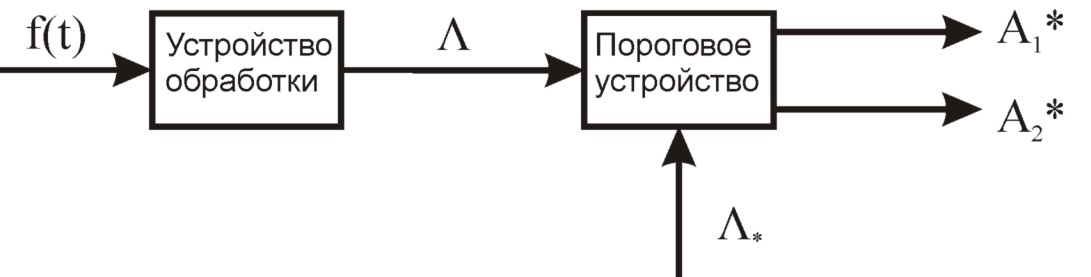
Рис. 3
В случае типичного нормального
распределения комплексных амплитуд
 дискретных значений принятого сигнала
отношение правдоподобия принимает вид:
дискретных значений принятого сигнала
отношение правдоподобия принимает вид:
 ,
,
где
 и
и
 - ковариационные матрицы фона и смеси
сигнала с фоном;
- ковариационные матрицы фона и смеси
сигнала с фоном;
 ,
,
 -
-
 -е
элементы матриц
-е
элементы матриц
 и
и
 ,
обратных соответствующим ковариационным
матрицам.
,
обратных соответствующим ковариационным
матрицам.
Вычисление экспоненты является операцией, сложной в реализации. Поэтому желательно найти некоторую однозначную монотонную функцию от отношения правдоподобия, имеющую более удобную форму. Такой функцией является
 .
.
Слагаемое
 не зависит от обрабатываемой реализации
принятого сигнала, а определяется лишь
статистическими параметрами сигнала
и фона, содержащимися в ковариационных
матрицах
и
.
Поэтому это слагаемое может быть отнесено
к порогу обнаружителя.
не зависит от обрабатываемой реализации
принятого сигнала, а определяется лишь
статистическими параметрами сигнала
и фона, содержащимися в ковариационных
матрицах
и
.
Поэтому это слагаемое может быть отнесено
к порогу обнаружителя.
В итоге отношение правдоподобия представляется монотонной функцией квадратичной формы
 ,
,
где
 −
−
 ый
элемент матрицы обработки
ый
элемент матрицы обработки
 .
.
Соответственно, решающее правило обнаружения принимает окончательный вид:
“если
 ,
то принимается решение
,
а если
,
то принимается решение
,
а если
 ,
то принимается решение
,”
,
то принимается решение
,”
где
 − порог обнаружения, соответствующий
байесовскому критерию качества - «минимум
среднего риска».
− порог обнаружения, соответствующий
байесовскому критерию качества - «минимум
среднего риска».
Следовательно, алгоритм обработки
принятого сигнала
заключается
во взвешенном накоплении этого сигнала,
причем весовые коэффициенты определяются
корреляционными свойствами отраженного
сигнала и фона
 .
.