

2.2. Корреляционное устройство когерентной обработки на видеочастоте.
Схема корреляционного устройства когерентной обработки на видеочастоте имеет вид, представленный на рисунке 10.6.
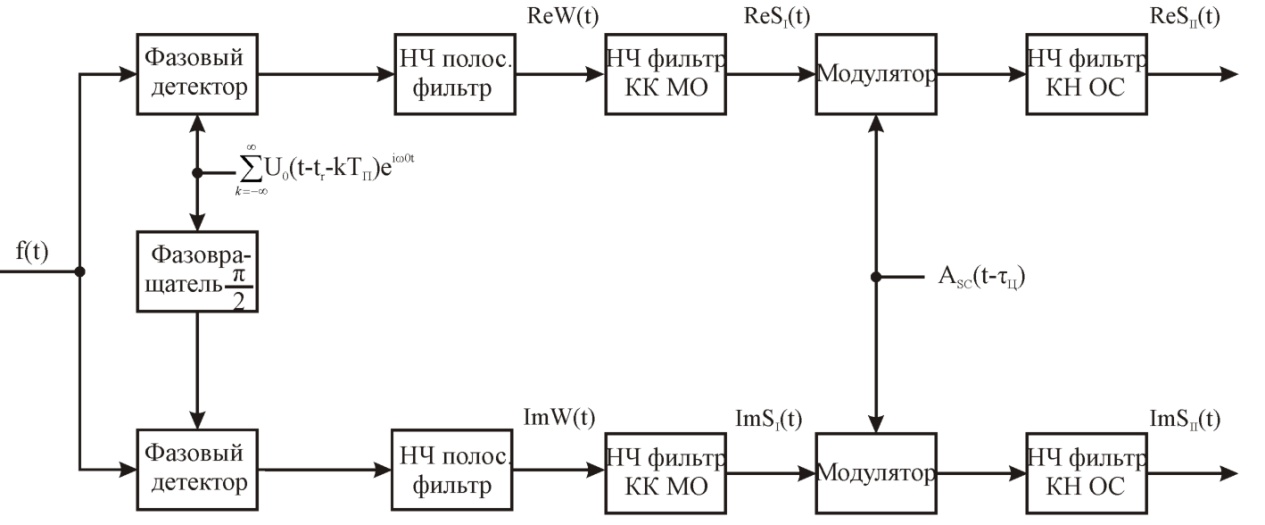
Рис. 10.6
В корреляционном устройстве когерентной обработки принятого сигнала на видеочастоте объединение результатов внутрипериодной обработки осуществляется с помощью нечувствительного (в данном случае) к частоте Доплера МО низкочастотного фильтра когерентной компенсации МО и перестраиваемого по частоте низкочастотного фильтра когерентного накопления.
Как и в корреляционном устройстве на
радиочастоте, принятый сигнал
«взвешивается» с огибающей
 в модуляторах, установленных перед
перестраиваемыми НЧ фильтрами когерентного
накопления, а при отсутствии такого
взвешивания соответствующим образом
расширяется полоса пропускания этого
фильтра. Согласование НЧ фильтра
когерентного накопления по частоте с
отраженным сигналом происходит путем
частотной перестройки этого фильтра.
в модуляторах, установленных перед
перестраиваемыми НЧ фильтрами когерентного
накопления, а при отсутствии такого
взвешивания соответствующим образом
расширяется полоса пропускания этого
фильтра. Согласование НЧ фильтра
когерентного накопления по частоте с
отраженным сигналом происходит путем
частотной перестройки этого фильтра.
Алгоритм работы корреляционного устройства когерентной обработки на видеочастоте описывается выражением:
 ,
,
 ,
,
где
 − комплексная огибающая импульсной
характеристики последовательно
соединенных фильтров, осуществляющих
когерентную компенсацию МО и когерентное
накопление ОС;
− комплексная огибающая импульсной
характеристики последовательно
соединенных фильтров, осуществляющих
когерентную компенсацию МО и когерентное
накопление ОС;
 и
и
 − опорные сигналы фазовых детекторов.
− опорные сигналы фазовых детекторов.
Квадраты АЧХ корреляционных устройств
на радио- и видеочастоте как устройств
когерентной обработки принятого сигнала
являются гребенчатыми. Их зубцы на
интервале протяженностью в
 описывают
квадраты АЧХ последовательно соединенных
радиофильтров или НЧ фильтров когерентной
компенсации и когерентного накопления:
в отсутствии «взвешивания» принятого
сигнала с огибающей
описывают
квадраты АЧХ последовательно соединенных
радиофильтров или НЧ фильтров когерентной
компенсации и когерентного накопления:
в отсутствии «взвешивания» принятого
сигнала с огибающей
 ;
;  ,
,
а при наличии такого «взвешивания»

 ;
.
;
.
48. Узкополосный фильтровой со стробированием способ и устройства когерентной обработки
Узкополосный фильтровой со стробированием
(УФС) способ когерентной обработки
предполагает осуществление фильтровой
ВПО, стробирование ее результатов в
моменты формирования корреляционного
интеграла
 и МПО в последовательно соединенных
фильтрах коррелятора для компенсации
МО и когерентного накопления отраженного
сигнала. Примеры таких устройств
обработки на радио- и видеочастоте
изображены на рис. 10.7 и 10.8.
и МПО в последовательно соединенных
фильтрах коррелятора для компенсации
МО и когерентного накопления отраженного
сигнала. Примеры таких устройств
обработки на радио- и видеочастоте
изображены на рис. 10.7 и 10.8.

Рис. 10.7
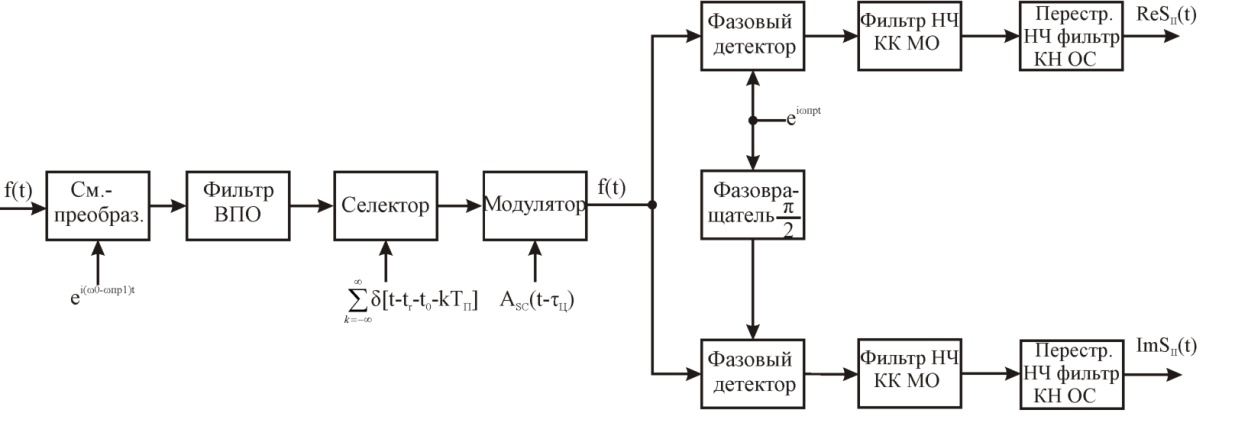
Рис. 10.8
Выходной сигнал рассматриваемого устройства обработки
 ,
,
где
 − сигнал на выходе фильтра ВПО.
− сигнал на выходе фильтра ВПО.
Замечание. из всех рассмотренных устройств когерентной обработки только фильтровые устройства обладают инвариантностью ко времени прихода отраженного сигнала.
49. Закономерности радиолокационного обзора.
Содержание радиолокационного обзора в общем случае составляет:
− получение отраженных сигналов от всех целей, находящихся в зоне действия РЛС;
− обнаружение этих сигналов в смеси с радиолокационным фоном, а следовательно, обнаружение целей;
− оценка закодированных в их параметрах координат и радиальных скоростей целей с ошибками, укладывающимися в соответствующие элементы разрешения.
Зона действия РЛС ограничивается интервалами обзора:
− по дальности
 ,
,
− по азимуту
 ,
,
− по углу места
 ,
,
− по радиальной скорости
 ,
,
которые содержат соответствующие количество элементов разрешения:
 ;
;
 ;
;
 ;
;
 .
.
Для получения на выходе антенной системы сигналов, отраженных от целей, находящихся в различных угловых направлениях, необходима:
− либо многоканальная антенная система,
формирующая одновременно,
 каналов (диаграмм направленности с
шириной
и
);
каналов (диаграмм направленности с
шириной
и
);
− либо одноканальная антенная система, осуществляющая последовательное перемещение одной диаграммы направленности по элементам разрешения по угловым координатам.
Время последовательного обзора по
угловым координатам
 оказывается в
оказывается в
 раз больше, чем одновременно
:
раз больше, чем одновременно
:
 .
.
Как в первом, так и во втором случае
каждый угловой канал обслуживается
обнаружителем, в котором производится
временная обработка принятого сигнала
с учётом времени запаздывания
 и частоты Доплера (скорости цели
)
отраженного сигнала.
и частоты Доплера (скорости цели
)
отраженного сигнала.
Такой обнаружитель может быть:
− либо многоканальным, имеющим
 каналов обнаружения и осуществляющим
одновременный (параллельный) обзор по
и
;
каналов обнаружения и осуществляющим
одновременный (параллельный) обзор по
и
;
− либо одноканальным, осуществляющим последовательный просмотр каждого из элементов разрешения по и .
Время просмотра одного элемента
разрешения по
 при последовательном обзоре равно
при последовательном обзоре равно
 ,
а при одновременном обзоре в
,
а при одновременном обзоре в
 раз больше
раз больше
 ,
,
где
 − время обзора одного углового
направления.
− время обзора одного углового
направления.


Кроме того, на практике встречаются комбинации обзора по и . Например,
a) последовательный по и одновременный по ;
б) одновременный по и последовательный по .
Качество радиолокационного обзора определяется:
− качеством обнаружения целей −
вероятностями
 и
;
и
;
− качеством оценки координат и радиальной скорости целей − ошибками оценки;
− качеством распознавания целей − вероятностями правильного и ложного распознавания;
− временем обзора.
Сначала рассмотрим отдельно обзоры по , и угловым координатам, а затем способы совмещения этих обзоров.