

1. Основные понятия о системах управления и регулирования. Принципы регулирования по отклонению и возмущению. (Сабанин 132, Шинкина а.В.)
Управление- (автоматич.,ручное,автоматизир.)-это совокупность действий,основанных на ин-фе о состоянии объекта управления(ОУ)и направлены на поддержание или улучшения функционирования ОУ в соответствии с имеющейся целью и программой.Качество управление определяется эффективностью функционирования и жизнеспособности ОУ.
Автоматизация - это применение автоматических методов и технич. средств,освобождающих человека частично/полностью от непосредственного участия в процессе управления.
Виды и способы управления:
- ручное дистанц. управление( "-" рутинность работы, => ошиб. действ)
-автоматич. управление
ОУ - динамическая система,для кот. определены вх и вых величины
3 постановки задачи автоматич. управления:
1)Управление с целью поддержания желаемого параметра(т.е. стабилизация или регулирование)(t воды на выходе из смесителя)
2)Управление с целью изменения параметра на выходе по задан. программе(т.е. программное управление/регулирование)(повышение t на 5градусов)
3)Оптимальное управление -это поддержание на нулевом значении производной от регулируемой величины по какой-либо доп. величине.(топка котла - для каждого расхода топлива - расход воздуха,чтобы t в топке была max)
Система АСУ начинается с определения функционального назначения и разработки схемы АСР. По функциональному назначению:стабилизир., системы программного назначения, следящие и экстрим. регулирования.
- стабилизир.-для непрерывно работающих процессов
-программн.управления- для периодических процессов,где треб. изменение программ для измен.параметров во времени(снабжение программ. устройствами,действ-ми на задатчик)
- следящие( похожи на программн.управ,но задатчик соединен с вых др. АСР)
-экстрим. - предназначены для поиска и стабилизации технологич.параметров на max и min уровнях.
Одноконтурная АСР по отклонению
А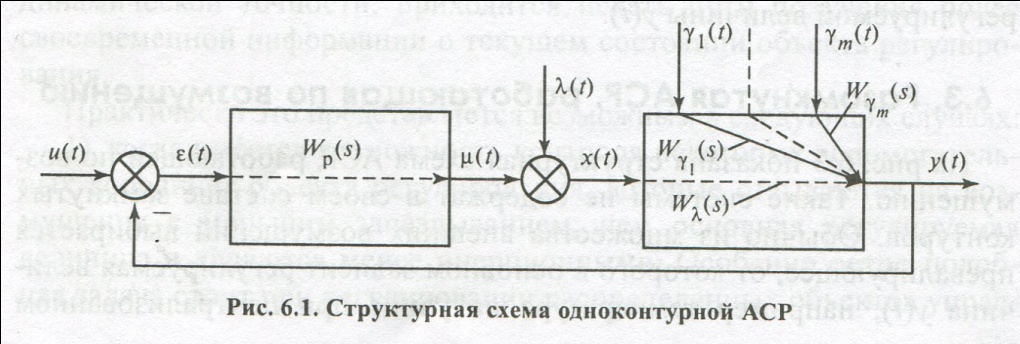 СР
работает по принципу отклонения y(t) от
заданного значения u(t).Основные составные
части АСР - объект управления с передаточной
функц.
СР
работает по принципу отклонения y(t) от
заданного значения u(t).Основные составные
части АСР - объект управления с передаточной
функц.
 (s)
и регулятор с
(s)
и регулятор с
 (s).
Стрелки -каналы взаимодействия. Работа
системы регулирования оценивается по
значению регулируемой y(t).Регулируемая
величина поддерживается автоматич.
регулятором, на вход которого подается
(s).
Стрелки -каналы взаимодействия. Работа
системы регулирования оценивается по
значению регулируемой y(t).Регулируемая
величина поддерживается автоматич.
регулятором, на вход которого подается
 ,
называется сигналом рассогласования.Работа
регулятора считается удовлетворительной,
если y(t)=u(t),установленного задатчиком(нужен
для внесения в сист. управлющего
воздействия-задает значение регулирующей
величины u(t).Работа регулятора начинается
при появлении
,
называется сигналом рассогласования.Работа
регулятора считается удовлетворительной,
если y(t)=u(t),установленного задатчиком(нужен
для внесения в сист. управлющего
воздействия-задает значение регулирующей
величины u(t).Работа регулятора начинается
при появлении
 => вырабатывается регулир. возд-ие
=> вырабатывается регулир. возд-ие
 ,сводимое
к теоретич мин/нулю.Регулир. воздействие
вносится на вход объекта с помощью
регулир. органа(РО).Возмущения л(t) - по
каналу регулир+внешн.воздействие.
,сводимое
к теоретич мин/нулю.Регулир. воздействие
вносится на вход объекта с помощью
регулир. органа(РО).Возмущения л(t) - по
каналу регулир+внешн.воздействие.
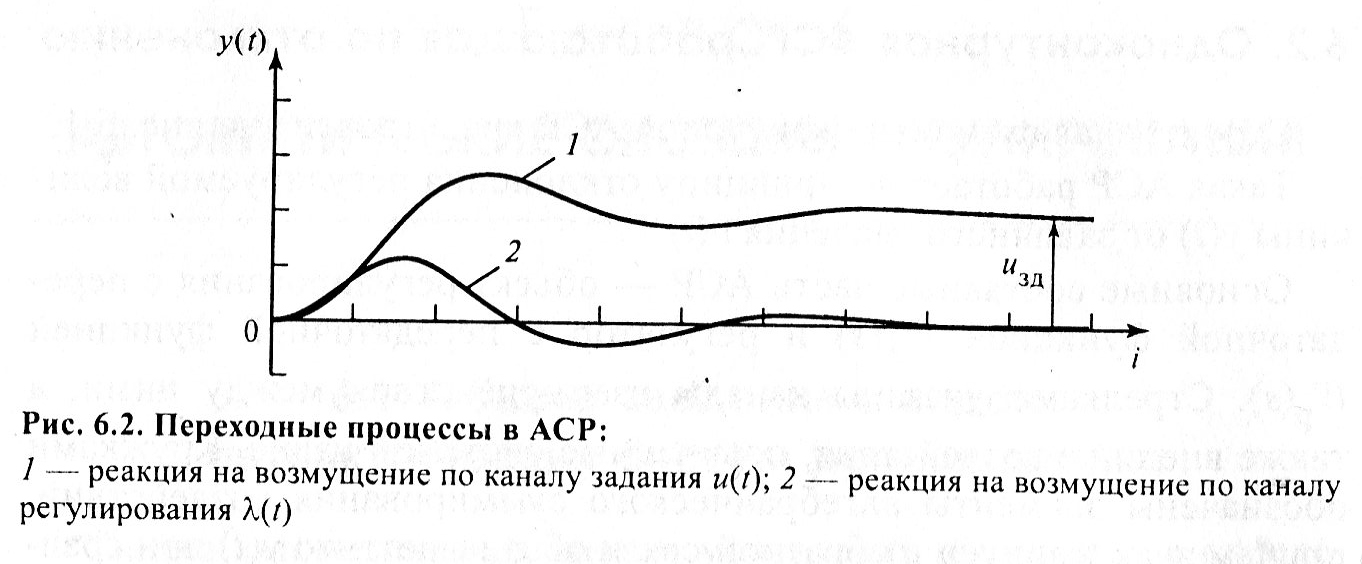
Простейшая оценка качества работы делается по анализу переходных процессов,после подачи на вход эталонного возмущения(ступенч.)
Задачи регулятора: за мин.t установить значение регулир-ой величины на задан. значении или поддерживать при действии возмущ. знач. регулир-ой величины на заданном уровне(u зд=0)
"+" работает пока значения регулир-ой величины не придет к нулю
"-" высокая инерционность,т.к. регулятор начинает работать ,только тогда - когда появится отклонение y(t)
Одноконтурная схема по возмущени
Т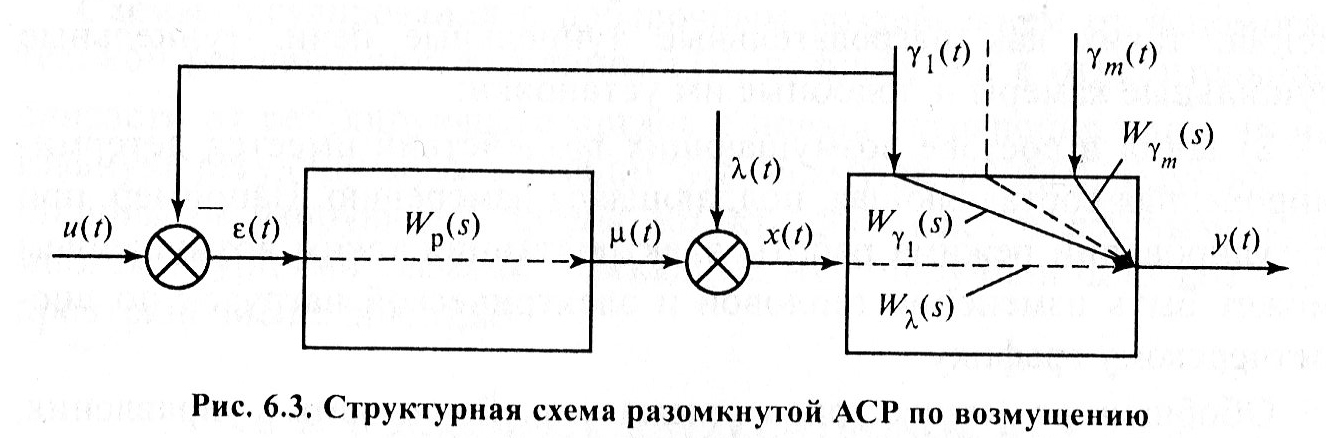 акие
схемы не содержат в своем составе
замкнутых контуров.Обычно из множества
внешних возмущений выбирается
превалирующее, от которого в основном
зависит регулируемая величина y(t) .
акие
схемы не содержат в своем составе
замкнутых контуров.Обычно из множества
внешних возмущений выбирается
превалирующее, от которого в основном
зависит регулируемая величина y(t) .
пример: t на улице при централизованном регулировании температуры одного/нескольких жилых домов .Измеряя темп. в каждом помещении дорого,а водном измерить -это не представительно.Поэтому навход регулятора подается темп,измеренаая на улице в окрестностях центрального теплового пункта.Задачик этой АСР предназначен для статической настройки.Для среднего проектного значения температуры на улице устанавливается такой выход регулятора(суммарная подача тепла в здании),что в с реднем темп. режим в помещениях соответств. норме . => если темп. на улице меняется- регулятор меняет подачу тепла.
"+" т.к. АСР разомкнутая - она быстродействующая: регулятор не ждет пока измен. темп. в помещениях, а сразу начинает менять подачу тепла.
"-" кроме выбранного возмущения регулятор не реагирует на другие и не имеет сведений о самой регулируемой величине.
Вывод: в резултате часто совмещают АСР по отклон. и по возмущ. и называют её комбинированной.