

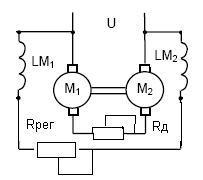
40. Двухдвигательный электропривод постоянного тока с общим механическим валом и параллельным включением двигателей.


![]() Первый
дв работает в двигательном режиме,
второй в рекуперативном. Происходит
циркуляция энергии, КПД системы снижается
.
Первый
дв работает в двигательном режиме,
второй в рекуперативном. Происходит
циркуляция энергии, КПД системы снижается
.
![]()
![]()
![]()
Уранять скорости и wo, помощью увеличения Ф (регулировочным сопротивлением). Для уменьшения жескости включают Rд в цепь якоря.
![]()
Недостаток: неравномерность распределения нагрузок из-за разности жесткостей.
41. Двухдвигательный электропривод постоянного тока с общим механическим валом и последовательным включением двигателей.
![]()
Если Ф1=Ф2=Ф=const
M1=M2=0,5Mс

42. Двухдвигательный электропривод с диффференциалом.
 В
распространенной схеме ЭП с механическим
дифференциалом (рис. 7.3, а) двигатели
1 и 6 приводят во вращение со скоростями
w1,w6 шестерни 2 и, 5 по которым обкатываются
шестерни 4, называемые сателлитами.
Вращение сателлитов 4 приводит к
вращению жестко связанной с ними выходной
шестерни 3, от которой движение через
дополнительную шестерню 8 передается
исполнительному органу 7 рабочей машины.
В случав идентичности механических
характеристик 2 двигателей и одинаковом
направлении их вращения характеристика
1 ЭП имеет вдвое боле высокую жесткость,
что следует из формулы .
В
распространенной схеме ЭП с механическим
дифференциалом (рис. 7.3, а) двигатели
1 и 6 приводят во вращение со скоростями
w1,w6 шестерни 2 и, 5 по которым обкатываются
шестерни 4, называемые сателлитами.
Вращение сателлитов 4 приводит к
вращению жестко связанной с ними выходной
шестерни 3, от которой движение через
дополнительную шестерню 8 передается
исполнительному органу 7 рабочей машины.
В случав идентичности механических
характеристик 2 двигателей и одинаковом
направлении их вращения характеристика
1 ЭП имеет вдвое боле высокую жесткость,
что следует из формулы .
![]() При вращении одного из двигателей в
противоположную сторону (характеристика
4) ЭП имеет характеристику 3, являющуюся
характеристикой динамического торможения.
Такие ЭП находят применение в металургич
производстве, бур скважин и крановых
механизмах. Их достоинства: ограничение
нагрузок ЭП при ИО, получение большого
диапазона регулирования скорости ЭП,
при относительно небольшом диапазоне
регулирования скорости одного из
двигателй, автоматическое распределение
нагрузки м\д двигателями. Движение ИО
может быть организовано либо от одного
или от 2х двигателей. При работе одного
дв. скоростьW3
будет определятся скоростью работающего
дв. При работе обоих дв скорость ЭП
будет определятся величинами и
направлениями скоростей W1
и W2.
При одинаковых диаметрах шестернь 2,5,4
вращение сателлитов относительно
вертикальной оси будет Wcт=(W1-W2)/2,
а угловая скорость шест 3 W3=(W1+W2)/2,
момент на шест 3 : М3=М1+М2=0,5Мс.
При вращении одного из двигателей в
противоположную сторону (характеристика
4) ЭП имеет характеристику 3, являющуюся
характеристикой динамического торможения.
Такие ЭП находят применение в металургич
производстве, бур скважин и крановых
механизмах. Их достоинства: ограничение
нагрузок ЭП при ИО, получение большого
диапазона регулирования скорости ЭП,
при относительно небольшом диапазоне
регулирования скорости одного из
двигателй, автоматическое распределение
нагрузки м\д двигателями. Движение ИО
может быть организовано либо от одного
или от 2х двигателей. При работе одного
дв. скоростьW3
будет определятся скоростью работающего
дв. При работе обоих дв скорость ЭП
будет определятся величинами и
направлениями скоростей W1
и W2.
При одинаковых диаметрах шестернь 2,5,4
вращение сателлитов относительно
вертикальной оси будет Wcт=(W1-W2)/2,
а угловая скорость шест 3 W3=(W1+W2)/2,
момент на шест 3 : М3=М1+М2=0,5Мс.

43. Учет упругих деформаций вала. При рассмотрении двухдвигательного привода (ДВ П) предполагается, что вал, соединяющий двигатели, абсолютно жесткий. Тот факт, что в действительности соединительный вал обладает определенной упругостью, не вносит каких-либо изменений в работу ЭП в устан-ся режимах. Скорости двигателей остаются равными как в случае жесткого, так и упругого вала. Однако для ДВ П с упругим валом дополнительный интерес представляет определение величин упругих моментов и деформации вала. Величина момента, возникающего в упругом валу, зависит от места приложения нагрузки. Если двигатели расположены симметрично относительно рабочего органа с нагрузкой Мс, согласно рис 1,
 то
в левой и правой половинах вала возникают
упругие моменты, соответственно равные
моментам двигателей МУ1=М1;
МУ2=М2.
Двигателю с более жесткой мех. харак.
соответствует больший упругий момент.
При этом роторы двигателей ЭД1 и ЭД2
будут повернуты друг относительно друга
на угол
то
в левой и правой половинах вала возникают
упругие моменты, соответственно равные
моментам двигателей МУ1=М1;
МУ2=М2.
Двигателю с более жесткой мех. харак.
соответствует больший упругий момент.
При этом роторы двигателей ЭД1 и ЭД2
будут повернуты друг относительно друга
на угол
![]() , где С – жесткость соединительного
вала
, где С – жесткость соединительного
вала
между двигателями. Если рабочий орган с двигателем ЭД1 связан жестко, а с ЭД2 через упругий вал, рис 2 , то в валу ротора двигателя ЭД2
 возникает
упругий момент, равный моменту этого
двигателя. При этом роторы двигателей
ЭД1 и ЭД2 будут повернуты друг относительно
друга на угол
возникает
упругий момент, равный моменту этого
двигателя. При этом роторы двигателей
ЭД1 и ЭД2 будут повернуты друг относительно
друга на угол
![]()
Наибольшие
величины МУ
и
![]() имеют место в том случае, когда мех.
хар-ка двигателя ЭД1 более мягкая, чем
двигателя ЭД2.
имеют место в том случае, когда мех.
хар-ка двигателя ЭД1 более мягкая, чем
двигателя ЭД2.