17. Регулирование скорости дпт независимого возбуждения шунтированием обмотки якоря.
С целью получ пониж скоростей и улучшению стабильности используют схему с шунтированием якоря ДПТ НВ. В схему параллельно вкл Rш, а последовательно Rд.
![]() ,
, где
,
, где
![]() В схеме с шунт якоря снижается Wо
и падает жескость по сравнению с основной
схемой включения. Используют два варианта
регулирования.
В схеме с шунт якоря снижается Wо
и падает жескость по сравнению с основной
схемой включения. Используют два варианта
регулирования.
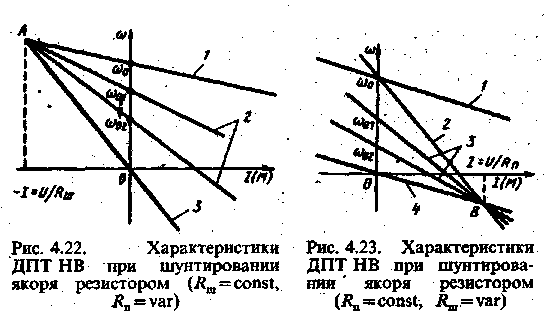
№1Rш=const и Rд=var.(рис 4.22) При Rд=0, основная схема включения, Rш вкл параллельно двигателю на сеть и не оказывает на него ни какого влияния. Двигатель работает на естественной характеристике 1.При Rд=бесконечность, -означает разрыв цепи и соответствует динамическому торможению 3. характеристика 2 при 0<Rд< безконечность. Все хар будут проходить через точку А, соответств I=U/Rш.
№2 Rд=const и Rш=var. (рис4.23) При Rш=0, якорь закорочен 4 (динамич торможение), параллельно естественной 1.При Rш=бесконечность –разрыв шунтавой цепи двигатель имеет искусственную характеристику 2. Хаар 2и 4 имеют разный наклон и пересекаются в точке В при I=U/Rд. Остальные характер 3 при 0<Rш< безконечность также проходят через В. Диапазон регулирования скорости лежит в пределах 5—б, плавность регулирования определяется плавностью изменения сопротивления Rm и Rд. Регулирование скорости осуществляется вниз от основной при постоянном моменте нагрузки, жесткость получаемых искусственных характеристик относительно высокая в области малых скоростей. Экономичность этого способа регулирования невысока из-за значительных потерь мощности в цепи якоря. По этой причине способ используется для регулирования скорости двигателей небольшой мощности или при кратковременной работе ЭП на пониженных скоростях.
18. Регулирование тока и моментов ДПТ независимого возбуждения при пуске. Расчет и построение пусковой диаграммы и определение пусковых сопротивлений. Регулирование I и М происходит в моменты разгона и торможения.
П
 уск:
уск:
![]() Для ограничения пускового тока в цепь
якоря включают добавочное сопротивление
Rд.
Rд
определяется исходя из выражения
Для ограничения пускового тока в цепь
якоря включают добавочное сопротивление
Rд.
Rд
определяется исходя из выражения
![]() ,
,![]() ,где U
и Rя
=const
. Для компенсации пускового тока Ф машины
делают максимально возможным.(в цепи
возбуждения убирают сопротивление, а
вцепь якоря вводят Rд).Чем
больше kФ,
тем быстрее спадает Iя.
,где U
и Rя
=const
. Для компенсации пускового тока Ф машины
делают максимально возможным.(в цепи
возбуждения убирают сопротивление, а
вцепь якоря вводят Rд).Чем
больше kФ,
тем быстрее спадает Iя.
![]() ,
,![]()
 Для
регулирования тока т и момента в цепь
якоря вводят регулируемый резистор,
что позволяет реализовать 2 и более
искусств характ, сузить пределы изменения
тока и момента, повысив точность их
регулирования. Резистор секционируется
на соответствующее число ступеней, (для
сокращения времени разгона). которые
закорачиваются, по мере разгона двигателя
(уменьшают Rд).
С целью создания автоматизированной
системы пуска или торможения строят
диаграммы.
Для
регулирования тока т и момента в цепь
якоря вводят регулируемый резистор,
что позволяет реализовать 2 и более
искусств характ, сузить пределы изменения
тока и момента, повысив точность их
регулирования. Резистор секционируется
на соответствующее число ступеней, (для
сокращения времени разгона). которые
закорачиваются, по мере разгона двигателя
(уменьшают Rд).
С целью создания автоматизированной
системы пуска или торможения строят
диаграммы.
19. Регулирование тока и моментов дпт независимого возбуждения при рекуперативном и динамическом торможении. Расчет и построение тормозной диаграммы и определение тормозных сопротивлений.
Д инамическое
торм происходит по характеристике 4,
отключением якоря от сети и замыканием
его на резистор Rд,
после достижения Wуст,
(определяемой пересечениями характеристик
дв 2 и ИО 3), дв переходит на хар динамич
торможения. Сопротивление Rд
определяется по допустимому броску
тока в первый момент перехода в режим
динам торм.
инамическое
торм происходит по характеристике 4,
отключением якоря от сети и замыканием
его на резистор Rд,
после достижения Wуст,
(определяемой пересечениями характеристик
дв 2 и ИО 3), дв переходит на хар динамич
торможения. Сопротивление Rд
определяется по допустимому броску
тока в первый момент перехода в режим
динам торм.
![]() ,
,![]() ,
,
Рекуперативное – торможение с возвратом энергии в сеть W>Wo, ЭДС>U при этом I и М изменяют свое направление на противоположное. Двигатель получает мех энергию от рабочей машины и отдает её в виде электроэнергии в сеть.