

44. Многодвигательные системы с уравнительными синхронными машинами.
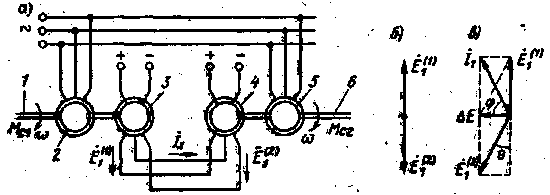
На валах 1 и 6 главны асинхронные двигателей 2 и 5 установлены идентичные уравнительные синхронные машины 3и 4, статорные обмотки которых включены таким образом, что наводимые них ЭДС Е1 и Е2 направлены навстречу друг яругу (рис.а). К каждому механическому шалу 1 и 6 ра6очей машины приложена соответственно нагрузка Мс1 и 2
При одинаковых скоростях и нагрузках первой и второй пар машин векторы ЭДС син машин будут, равны по величине и направлены «навстречу друг другу (рис.б). При этом ток в цепях статоров машин будет =0 и машины не будут развивать моментов.
Если в процессе работы нагрузка на одном из валов, возрастет, то вектор ЭДС машины 4 Е2 повернется в сторону отставания на некоторый угол Q (рис в). В цепи статорных обмоток начнет действовать разностная ЭДС ∆Е, под действием которой по обмоткам статоров машин 3 и 4 потечет ток I1 .( уравнительный) машины начнут развивать момент.
Так как проекция вектора тока I1 на вектор ЭДС E1 положительна, а на вектор Ё2 отрицательна, то машина 3 начнет работать генератором, создавая тормозной момент, а машина 4- двигателем. Суммарный движущий момент на валу будет возрастет и его скорость увеличится, а на валу 1 уменьшится и его скорость снизится. Валы 1 и 6 будут вращаться с одинаковой скоростью синхронно.
Синхронизирующий
момент синхронных машин определяется
:
![]()
где Q—угол сдвига фаз между ЭДС Е1 и Е2; x1 -синхронное индуктивное сопротивление синхронной машины.
45. Многодвигательные системы с уравнительным асинхронными машинами, вращающимися по полю.
 Уравнительные
машины 3 и 4, находящиеся на валах 3 и 4
основных двигателей 2 и 5, представляют
собой идентичные АД с одинаковыми U,
числом фаз и полюсов, статорные обмотки
которых подключены к общей трехфазной
сети переменно-го тока, а роторные
соединены между собой таким образом,
чтобы наводимые в них ЭДС были направлены
навстречу друг другу. Работа электрического
вала происходит следующим образом. Если
нагрузка обоих валов одинакова, то они
вращаются синхронно (и синфазно) с
одинаковой скоростью. Вследствие
встречного направления ЭДС вспомогательных
машин Е1 и Е2 и их равенства, ток в цепи
их роторов I2
будет отсутствовать, и машины 3 и 4 моменты
развивать не будут. Мс1=Mc2,w1=w2,
Iур=0
Уравнительные
машины 3 и 4, находящиеся на валах 3 и 4
основных двигателей 2 и 5, представляют
собой идентичные АД с одинаковыми U,
числом фаз и полюсов, статорные обмотки
которых подключены к общей трехфазной
сети переменно-го тока, а роторные
соединены между собой таким образом,
чтобы наводимые в них ЭДС были направлены
навстречу друг другу. Работа электрического
вала происходит следующим образом. Если
нагрузка обоих валов одинакова, то они
вращаются синхронно (и синфазно) с
одинаковой скоростью. Вследствие
встречного направления ЭДС вспомогательных
машин Е1 и Е2 и их равенства, ток в цепи
их роторов I2
будет отсутствовать, и машины 3 и 4 моменты
развивать не будут. Мс1=Mc2,w1=w2,
Iур=0
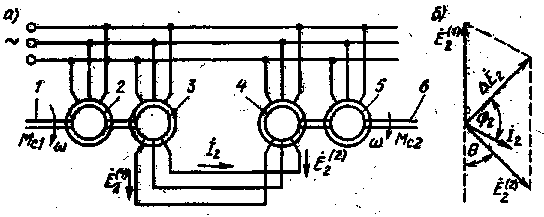
Если увеличился момент нагрузки на валу 6. Ротор АД 4 начнет отставать от ротора АД 3 и вектор ЭДС этой машины Ё2 повернется в пространстве на угол Q относительно своего прежнего положения (рис.б}. В результате в роторной цепи машин 3 и 4 появится разностная ЭДС ∆Е2, под действием которой по обмоткам роторов начнет протекать уравнительный ток I2.
Проекция вектора этого тока на вектор ЭДС Ё2 будет положительной, то машина 4, начнет развивать дополнительный движущий момент на валу 6, за счет чего его скорость будет выравниваться со скоростью1 вала.
Если Мс1>Mc2, w1<w2, S1>S2, E3(s2)>E4(s2), Iур = не 0 .3-я машина двигательный 4-ая генерат режим. Вспомогательные машины будут компенсировать: Мс1=М1+М3; Мс2=М2+М4; Мур=Мс1-Мс2=М3-М4.
Уравнительное действие вспомогательных машин тем больше, чем больше угол Q. Увеличение уравнительного момента, происходит до значений Q=п/2, после чего уравнительный момент уменьшается и система электрического- вала может выпасть из синхронизма.
 Рэл(3)=Рэ.м(3)=М3Wo
Рэл(3)=Рэ.м(3)=М3Wo
Рм(3)=М3W= М3Wо(1-S)= Рэ.м(3) (1-S)
Рур3= Рэл3- Рм(3)= М3Wo- М3Wо(1-S)= Рэл(3)S
Рур4= Рур4= Рэл(4)S
Рм(4)= М4Wo= Рэ(4) (1-S)
Рэ4=Рм(4)+Рур4=Рэ(4) (1-S)+Рэл(4)S=4Wo