

32. Регулирование скорости ад, изменением напряжения и частоты.
1)Изменением напряжения:
Одним из возможных способов регулирования скорости АД
является изменение напряжения на выводах его статора, при этом частота такого напряж. постоянна и равна частоте переменного тока.
В соответствии с формулами:
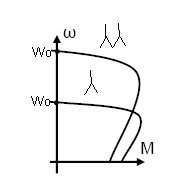
1)Скорость идеал. х.х. не изменяется, так как она не зависит от напряжения 2)Критич. момент изменяется пропорцион. квадрату напряж.3)Критич. скольжение не зависит от напряж. и поэтому не изменяется. В соответствии с проведенным анализом можно изобразить след. механ. хар-ки:
Как
видно из этого графика,получаемые
искусств. хар-ки оказ-ся малопригодны
ми для целей регулирования скорости,
так как по мере уменьш-ия напряжения
резко снижается критич. момент АД и его
перегрузочная способность, а также
 мал
диапазон регулирования скорости.
мал
диапазон регулирования скорости.
2)Изменением частоты:
Возможность регул-я скорости АД при регул-ии f1 следует из выражения ω0=2 pi f1/p,из которого видно что синхронная скорость АД прямо пропорцион. частоте напряж. статора.
В соответствии с формулами:
1) Критич. момент не зависит f1 и поэтому не изменяется
2) Критич. скольжение не зависит от f1 и поэтому не изм-ется.
3)Синхронная скорость прямо пропорц. частоте.

Следует отметить, что при значительном снижении частоты питающего напряжения
будет уменьшаться критический момент, это связано с тем, что при малых частотах активное сопротивл. становиться соизмеримым с реактивным.Критич. момент уменьшается и при сначительном повышении частоты.
Показатели регулирования: диапазон 10, плавность-хорошая, стабильность- не изменяется, направление регул-я – вверх, вниз; допустимая нагрузка не изменяется, экономичность – хорошая.
33. Регулирование скорости ад изменением числа пар полюсов.
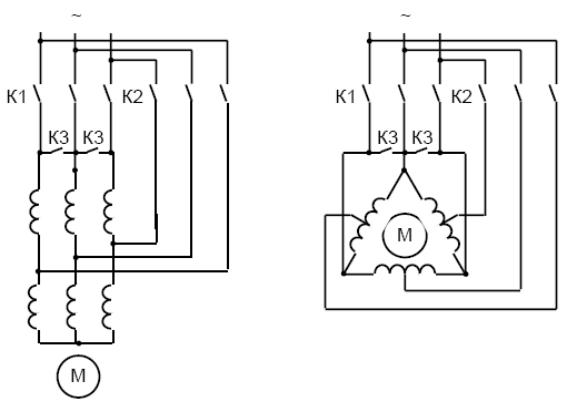
Синхронная скорость асинхронного двигателя зависит от частоты напряжения на статоре f1 и от числа пар полюсов рП, для изменения числа пар полюсов двигателя рП используются выводы средних точек его статорных обмоток. АД с фазным ротором не регулируются из-за колец токосъема. На правом рисунке нижние полуобмотки соединены между собой, и напряжение питания подается на параллельно соединенные полуобмотки. При таком включении в машине образуется только два полюса 2рП = 2. Число пар полюсов уменьшается в два раза, синхронная скорость
 ω0
= 2·π·f/pП
– увеличивается
в два раза.
основные
показатели регулирования
ω0
= 2·π·f/pП
– увеличивается
в два раза.
основные
показатели регулирования
1. Точность – высокая, двигатель работает на естественных характе-
ристиках на обеих ступенях.
2. Диапазон регулирования = 2-3 ступени
3. Плавность – нету регулирование ступенчатое
4. Допускаемая нагрузка -не изменяется
5. Экономичность – дополнительные потери отсутствуют, так как двигатель работает на естественных характеристиках, КПД η и cos(φ) в различных схемах приблизительно одинаковы.

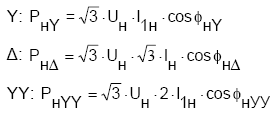
 Py=0.5Pуу
Р∆= Pуу
P=wM
Py=0.5Pуу
Р∆= Pуу
P=wM
При замыкании К1 получаем Yили ∆ (2p=4), размыкаем К1, замыкаем К2,3 получается YY Двигатель включается в работу на скорости с числом полюсов 2р = 2, и скорость его вращения увеличивается вдвое.
34. Регулирование тока и момента АД с короткозамкнутым ротором при пуске и торможении. Регулирование тока и момента при пуске в двигателе с короткозамкнутым ротором. 1 способ: Включают реактивное сопротивление в каждую фазу – реакторный пуск.

2 способ: Запуск на пониженном напряжении питания статора. Автотрансформаторный пуск.

3 способ – переключение обмоток статора с треугольника на звезду
 Аналогично
производят и торможение.
Аналогично
производят и торможение.