

11. Канонический синтез цифровых автоматов.
Математическая модель цифрового устройства представляется в виде абстрактного автомата (АА). АА задается множеством:
S={A, Z, W, δ, λ, a0}, где
А – множество состояний автомата;
Z – множество входных сигналов (входной алфавит);
W – множество выходных сигналов автомата (выходной алфавит);
δ – функция переходов автомата;
λ – функция выходов;
a0 – исходное состояние автоматов.
Автомат, у которого множества A, Z, W ограничены, называется конечным автоматом. Абстрактный автомат можно представить в виде «черного ящика», имеющего один входной и один выходной сигнал. Очевидно, что абстрактный автомат преобразует символы входного алфавита в символы выходного алфавита. Таким образом, абстрактный автомат является наиболее общей моделью устройства обработки информации.
Существует два основных способа задания абстрактного автомата:
табличный;
графический.
На практике наиболее широко распространены две модели автоматов:
Автомат Мили
Функция перехода – ![]() ;
;
Функция выходных сигналов – ![]() .
.
Автомат Мура
Функция перехода – ;
Функция выходных сигналов – ![]() .
.
Чтобы оценить состояние автомата в любой момент времени достаточно знать исходное состояние и последовательность входных сигналов, поступивших за данный отрезок времени. Под действием входных сигналов в каждый момент времени автомат переходит из предыдущего в следующее состояние.
Состояние автомата – память о входных сигналах, поступивших на вход автомата в предыдущий момент времени. Состояние хранит трассу функционирования автомата.
12. Структурный автомат.
Структурный автомат – устройство, которое реализует закон поведения абстрактного автомата. Представляет собой схему, состоящую из логических элементов и элементов памяти.
В основе функционирования современных цифровых устройтв лежит принцип микропрограммного управления. Согласно этому принципу любое цифровое устройство можно представить как композицию двух основных частей: операционного автомата и управляющего автомата.
Общая структура цифрового устройства.

Операционный автомат (ОА) получает на вход данные D, обрабатывает их и формирует выходной результат R. Процесс обработки данных происходит согласно алгоритму функционирования ОА. Этот алгоритм может быть представлен, например графически, в виде блок-схемы, в операторных вершинах которой указаны выполняемые команды по обработке данных, а в условных вершинах указано, какие необходимы проверки условий, для определения дальнейшего хода алгоритма. ОА формирует набор запросов Х, направленных в управляющий автомат (УА), эти запросы Х отражают проверяемые условия. УА соответственно реагирует на результаты проверки условий Х, и формирует набор управляющих сигналов У, направленных в ОА. Этот набор управляющих сигналов У разрешает разрешает выполнить определенные действия в ОА. Так происходит на каждом шаге функционирования. Очевидно, что между ОА и УА постоянно происходит диалог, определяемый функциональным алгоритмом.
Пример.
![]()
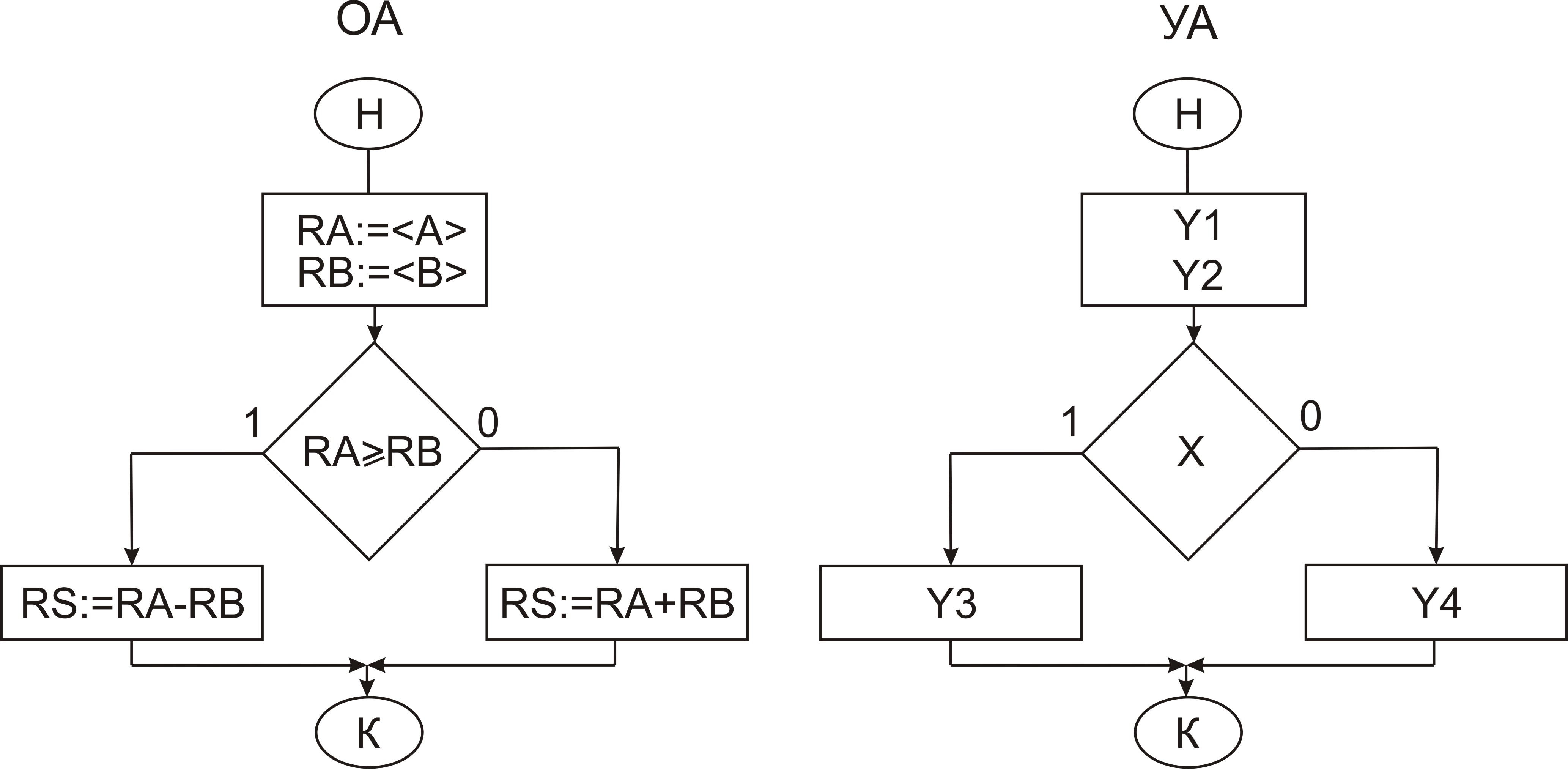
На левом рисунке изображен функциональный содержательный алгоритм для операционного автомата. На правом рисунке изображен закодированный алгоритм функционирования (граф схема алгоритма – ГСА).
В примере для управляющего автомата в вершинах ГСА записаны закодированные микрокоманды, обозначаемые Yi. Процесс выполнения каждой микрокоманды (МК) Yi включает ряд элементарных действий по обработке информации, непосредственно связанной с аппаратурой. Эти элементарные действия называются микрооперацией (МО), обозначаются yi. Таким образом, МК состоит из набора МО.
Пример. Выполнение команды RS := RA + RB состоит из следующих МО:
y1: записать содержимое регистра А на шину операнда А1 (RAшина А1);
y2: записать содержимое регистра В на шину операнда А2 (RВшина А2);
y3: на сумматоре сложить содержимое шин А1 и А2 (Sшин:=A1+A2);
y4: записать результат суммирования на шине результатов Z1(SшинZ1);
y5: записать содержимое шины Z1 в регистр результат RS (Z1RS);
Y={y1,…,y5}, таким образом команда состоит из пяти МО.
Каждая микрокоманда yi выполняется только при наличии специального разрешающего сигнала. Этот сигнал также называется уравновешивающим, формируется в управляющем автомате и обозначается также, как и соответствующая МО, т.е. yi. Таким образом, физически yi – это сигналы, формируемые в УА. Сложность схемы ОА в сотни раз превышает сложность УА.