

3.3 Определение общего передаточного числа привода и его разбивка по ступеням привода.
После подбора электродвигателя необходимо выполнить расчёты по определению общего передаточного числа U привода и сделать его разбивку по отдельным ступеням (передачам) привода.
Общее передаточное число «U» определяют, исходя из угловых скоростей ведущих и ведомых звеньев привода.
![]()
Передаточные числа приведённые в таблице ГОСТ относятся к одноступенчатым передачам.
Далее разбивают общее передаточное число Uобщ по отдельным ступеням заданной кинематической схемы.
От целесообразности разбивки общего передаточного числа по ступеням зависит:
- удобство смазки зубчатых колёс передачи;
- конструкция корпуса и его габариты;
- удобство компоновки деталей в самом корпусе.
Универсальных рекомендаций по разбивке общего передаточного числа, удовлетворяющих всем требованиям, не существует.
Выбор того или другого способа разбивки общего передаточного числа Uобщ по ступеням зависит от требований, которым должна отвечать конструкция, например:
- получение одинакового погружения зубчатых колёс, как быстроходной (ведущей), так и тихоходной (ведомой) ступеней в масляную ванну корпуса;
- получение наименьшей площади для корпуса редуктора;
- обеспечение минимальных размеров редуктора по высоте и ширине;
- обеспечение минимального суммарного веса зубчатых колёс и других деталей.
Иногда в основу способа разбивки передаточного числа кладут условия полного использования нагрузочной способности всех ступеней редуктора.
Стандартные передаточные числа в таблице ГОСТ для передач одноступенчатых редукторов приводятся в литературе.
Хотя универсального критерия правильности разбивки общего передаточного числа Uобщ дать нельзя, однако можно привести некоторые рекомендации по выбору передаточных чисел отдельных ступеней (передач), например:
- при разбивке общего передаточного числа рекомендуется исходить из средних значений, приведённых в таблице ГОСТ;
- не следует брать наибольшие значения передаточных чисел приведённых в таблице ГОСТ, так как габариты механических передач получаются при этом громоздкими (большими).
Исходными данными для разбивки общего передаточного числа Uобщ служат вращающие моменты, угловая скорость рабочего вала, иногда эти величины не заданы, но могут быть определены по другим характеристикам (скорости цепи конвейера, ее натяжению или диаметру звездочки).
Пример расчета:
Для цепного транспортера по заданной схеме выполнить энерго-кинематический расчет привода и выбор электродвигателя.
Исходные данные к расчету:
F = 9 (кН) – тяговое усилие цепи;
υ = 0,5 (м/с) – скорость цепного конвейера;
Pt = 230 (мм) – шаг тяговой цепи конвейера;
Z1 = 6 (зубьев) – число зубьев тяговой звездочки транспортера.
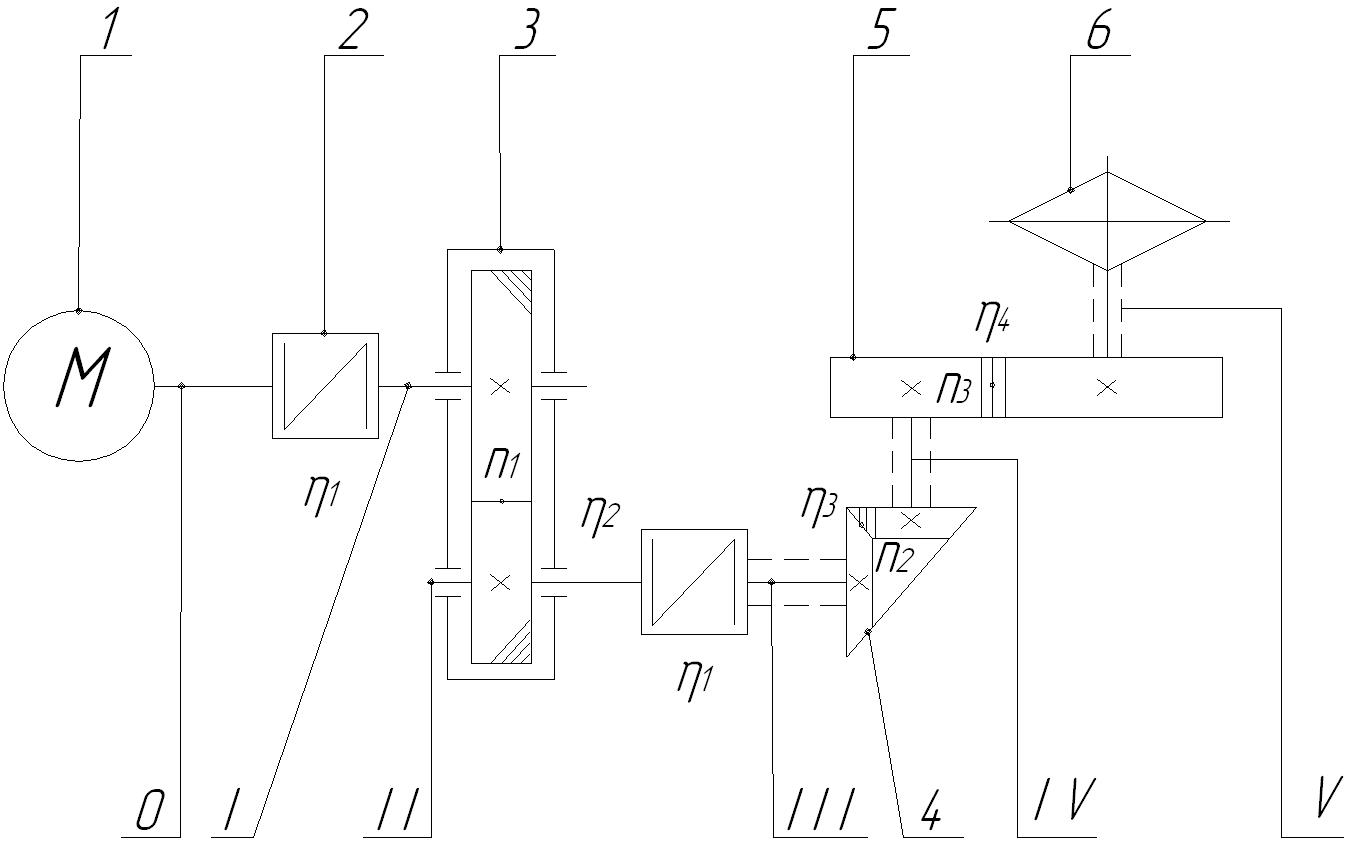
Рис 4. Схема привода
1 – электродвигатель;
2 – соединительные муфты (потери мощности обозначают через η1;)
3 – редуктор одноступенчатый цилиндрический косозубый закрытый (обозначают: потери мощности парой зубчатых колес η2, полюс зацепления этой пары П1, передаточное число в этом полюсе через U1);
4 – передача коническая открытая (в полюсе П2 для пары конических передач принимаю U2, а потери мощности через η3);
5 – передача цилиндрическая прямозубая открытая (в полюсе П3 для пары зубчатых колес передачи принимаю U3, а потери мощности обозначаю через η4);
6 – конвейер цепной однорядный, для которого в задании указаны такие данные:
F = 9 (кН) – тяговое усилие цепи;
υ = 0,5 (м/с) – скорость цепного конвейера;
Pt = 230 (мм) – шаг тяговой цепи конвейера;
Z1 = 6 (зубьев) – число зубьев тяговой звездочки транспортера.
Валы привода для заданной кинематической схемы
0 – вал электродвигателя.
Для
вала электродвигателя необходимо найти
требуемую мощность электродвигателя
![]() и асинхронную частоту вращения вала
электродвигателя ns
с учетом скольжения.
и асинхронную частоту вращения вала
электродвигателя ns
с учетом скольжения.
I – ведущий (быстроходный) вал редуктора, для которого необходимо найти мощность P1, момент кручения Т1, частоту вращения n1 и угловую скорость ω1. Вал электродвигателя 0 и вал редуктора I соединены муфтой.
II – ведомый вал редуктора, для которого необходимо найти мощность Р2, момент кручения Т2, частоту вращения n2 и угловую скорость ω 2.
III – ведущий вал конической открытой передачи, для него определим мощность Р3, момент Т3, частоту вращения n3 и угловую скорость ω 3, которые он будет передавать дальше.
Ведомый вал редуктора и ведущий вал конической передачи соединены муфтой.
IV – ведомый вал конической передачи.
На этом валу установлены два звена: ведомое коническое колесо и ведущая шестерня цилиндрической прямозубой открытой передачи.
Обозначим для IV вала искомые параметры Р4 Т4 n4 ω 4, которые он будет передавать дальше.
V – вал конвейера одноцепного.
На этом валу установлены два звена: ведомая шестерня цилиндрической прямозубой открытой передачи и тяговая звездочка одноцепного транспортера.
Обозначим
для V вала искомые параметры через
![]()
Краткое описание работы привода
В цепных конвейерах тяговым элементом являются цепи различного типа: пластинчатые, крючковые, вильчатые, круглозвенные.
Достоинство этих цепей в том, что они при малой своей массе имеют высокие тяговые усилия, просты в изготовлении, удобны для крепления к ним различных элементов ходовой части конвейера, достаточную поперечную жесткость, износостойкость и надежность.
Недостатком цепного конвейера и его тягового элемента являются:
- наличие большого числа шарниров, требующих регулярного досмотра и периодического смазывания;
- интенсивное изнашивание цепи при высоких скоростях из-за наличия динамических усилий. Средняя скорость цепного конвейера составляет (0,5…1) м/с.
Цепь обеспечивает надежную передачу тягового усилия при зацеплении цепи со звездочкой и мало растягивается под нагрузкой.
Одновременно с транспортированием груза на цепном конвейере можно производить различные технологические операции.
Особо широко эти конвейеры применяются в сборочных цехах, автоматизированных цехах.
Рассмотрим процесс передачи вращательного движения от ротора электродвигателя к цепному конвейеру по всем ступеням привода.
От электродвигателя через соединительную муфту 2 вращение передается на ведущий вал I закрытого редуктора 3, затем через шпонку и полюс зацепления П1 цилиндрической передачи редуктора 3 вращение передается на ведомый вал II редуктора.
Далее через соединительную муфту 2 мощность поступает на ведомый вал III конической передачи, а далее через шпонку и полюс П2 передается на открытую цилиндрическую передачу и наконец через шпонку и полюс зацепления П3 открытой цилиндрической передачи мощность поступает на вал V цепного однозвенного конвейера.
Таким образом, замыкается процесс передачи вращательного движения по ступеням привода.
Одноступенчатые косозубые цилиндрические редукторы имеют широкое применение в промышленности.
Считаю, спроектированный мною редуктор будет иметь оптимально подобранные детали для работы привода с цепным конвейером.
Кинематический расчет привода и выбор электродвигателя
Параметры вала цепного конвейера
-
мощность конвейера
![]() (кВт)
(кВт)
- частота вращения вала конвейера
![]()
- угловая скорость вращения вала конвейера
![]()
- вращающий момент на валу конвейера

Выбор электродвигателя [1, с4, с5, т1.1] [2, с4, т1.2]
 ,
,
где
![]() η1
=
0,98 – КПД соединительной муфты;
η1
=
0,98 – КПД соединительной муфты;
η2 = 0,98 – КПД цилиндрической косозубой передачи редуктора;
η3 = 0,96 – КПД конической открытой передачи;
η4 = 0,97 – КПД открытой цилиндрической прямозубой передачи;
η5 = 0,99 – КПД пары подшипников качения принятых для одного вала.
Назначаю типоразмер электродвигателя [1, с390, с391] его габаритные размеры, а так же установочные и присоединительные размеры.
- назначение типоразмера электродвигателя веду по требуемой мощности, принимая из таблицы ГОСТ ближайшее большее к требуемой мощности, т.е. ближайшее к = 5,402 кВт.
Каждому значению мощности ГОСТ рекомендует четыре типа электродвигателя с синхронной частотой вращения n = 3000 об/мин; n = 1500 об/мин; n = 1000 об/мин; n = 750 об/мин. Чтобы выбрать из четырёх типов электродвигателей один тот, который нам необходим нужно предварительно:
- определить передаточные всех четырёх предлагаемых электродвигателей по отношению частот вращения, например:
При
n=3000 об/мин, имею
![]()
При
n=1500 об/мин, имею
![]()
При
n=1000 об/мин, имею
![]()
При
n=750 об/мин, имею
![]()
Анализ полученных ориентировочных передаточных чисел показывает, что лучше всего выполнить разбивку по трём механическим передачам заданной кинематической схемы для двигателя при nгост=1500 об/мин и U`прив=69, а это значит, что можно остановить свой выбор на электродвигателе типоразмера 112М4/1445, для которого в таблице ГОСТ имеем Ргост=5,5 (КВт) с синхронной частотой вращения вала электродвигателя nгост=1500 об/мин.
Выбранный электродвигатель типоразмер 112 М4 / 1445 относится к электродвигателям серии 4А, исполнения закрытого, обдуваемого ГОСТ 19523- – 81, для которого имеем :
габаритные размеры L1 = 452 мм, L2 = 534 мм, Н = 310 мм,
D = 260 мм
установочные и присоединительные размеры
d1 = 32 мм, d2 = 32 мм, l1 = 80 мм, l2 =70 мм, l3 =140 мм, в =190 мм, d =12мм
Рис. 5 Схема электродвигателя
Таким
образом, дальнейший расчет курсового
проекта (работы) буду вести по требуемой
мощности
![]() =
5,402 (кВт) и асинхронной частоте вращения
вала электродвигателя ns
1445 об/мин (с учетом скольжения).
=
5,402 (кВт) и асинхронной частоте вращения
вала электродвигателя ns
1445 об/мин (с учетом скольжения).
Определим требуемое передаточное число для заданного привода.
![]()
Произведем разбивку требуемого передаточного числа по ступеням (передачам) привода.
Для заданной кинематической схемы привода имеем три передаточных ступени (передачи):
U1 – цилиндрическую косозубую в закрытом редукторе,
U2 - коническую открытую передачу,
U3 – цилиндрическую открытую прямозубую передачу .
Следовательно, формула для разбивки требуемого передаточного числа привода будет иметь следующий вид :
![]()
В целях компактности передач привода рекомендуется одно последнее неизвестное U3 находить из формулы (1.4), а два других неизвестных U1 и U2 назначать из таблицы ГОСТ .
Принимаю из ГОСТ
U1 = 3,5 – передаточное число косозубой цилиндрической передачи редуктора
U2 = 4,5 – передаточное число открытой конической передачи, тогда из (1,4) выражаю передаточное число открытой цилиндрической прямозубой передачи
![]()
После того как найдено значение U3 = 4,22 его необходимо согласовать с рекомендуемым диапазоном этой передачи в таблице ГОСТ .
Уточним передаточное число привода, подставив в нее все найденные значения U1 ; U2 ; U3 .
![]()
Выполним проверку, т.е. найдем % расхождения между передаточным потребным числом и передаточным уточненным числом.

допустимо, 2 %
Определим мощности на каждом валу привода
вал электродвигателя имеет потребную мощность =5,402 (кВт).
ведущий вал редуктора.
Участок, на котором передается потребная мощность расположен от полумуфты до шпонки установленной под шестерней ведущего вала редуктора, а это значит, что мощность потерялась на трение в муфте 1 и паре подшипников 5 .
![]() ,
откуда
,
откуда
![]()
- ведомый вал редуктора.
Участок, на котором передается мощность Р1 расположен от шпонки под шестерней ведущего вала редуктора до шпонки под колесом ведомого вала, а это значит, что мощность Р1 потерялась на трение в зацеплении косозубой передачи 2 в редукторе и паре подшипников 5 .
![]() ,
откуда
,
откуда
![]()
- ведущий вал открытой конической передачи.
Участок, на котором дальше передается мощность Р2 расположен от шпонки под колесом ведомого вала редуктора до шпонки под шестерней конической передачи, а это значит, что мощность Р2 потерялась на трение в муфте 1 и паре подшипников 5
![]() ,
откуда
,
откуда
![]()
![]()
- ведомый вал конической открытой передачи.
Участок, на котором дальше передается мощность Р3 расположен от шпонки под конической шестерней до шпонки под коническим колесом, а это значит, что мощность Р3 потерялась на трение в зацеплении конической передачи 3 и паре подшипников 5
![]() ,
откуда
,
откуда
![]()
- вал конвейера (уточняем (проверяем) ранее найденное).
Участок, на котором дальше передается мощность Р4 расположен от шпонки под цилиндрической шестерней открытой цилиндрической передачи до шпонки установленной под цилиндрическим колесом, т.е. мощность Р4 потерялась на трение в зацеплении цилиндрической открытой передачи 4 и паре подшипников 5 .
![]() ,
откуда
,
откуда
![]()
% расхождения

допустимо, 2 %
Определим частоту вращения на каждом валу привода, заданной кинематической схемы.
ns = 1445 (об/мин) – вал электродвигателя (с учетом скольжения)
n1 = ns = 1445 (об/мин) – ведущий вал редуктора.
![]() – ведомый
вал редуктора.
– ведомый
вал редуктора.
![]() – ведущий
вал конической передачи.
– ведущий
вал конической передачи.
![]() – ведомый
вал конической передачи.
– ведомый
вал конической передачи.
![]() – вал
конвейера (уточнённое значение числа
оборотов вала конвейера).
– вал
конвейера (уточнённое значение числа
оборотов вала конвейера).
Процент
расхождения между числом оборотов
![]() и
и

допустимо ±2%
Определим угловую скорость на каждом валу привода для заданной кинематической схемы.
![]() (рад/с)
– вал электродвигателя.
(рад/с)
– вал электродвигателя.
![]() (рад/с)
– ведущий вал редуктора.
(рад/с)
– ведущий вал редуктора.
![]() – ведомый
вал редуктора.
– ведомый
вал редуктора.
![]() (рад/с)
– ведущий вал конической передачи.
(рад/с)
– ведущий вал конической передачи.
![]() (рад/с)
– ведомый вал конической передачи.
(рад/с)
– ведомый вал конической передачи.
![]() (рад/с)
– на валу конвейера (уточнённое).
(рад/с)
– на валу конвейера (уточнённое).
% расхождения

допустимо ±2%
Определим вращающие моменты на каждом валу привода для заданной кинематической схемы.
![]() (Н*м)
– на валу электродвигателя.
(Н*м)
– на валу электродвигателя.
![]() (Н*м)
– на ведущем валу редуктора.
(Н*м)
– на ведущем валу редуктора.
![]() (Н*м)
– ведомый вал редуктора.
(Н*м)
– ведомый вал редуктора.
![]() (Н*м)
– ведущий вал редуктора.
(Н*м)
– ведущий вал редуктора.
![]() (Н*м)
– на ведомом валу конечной передачи
(Н*м)
– на ведомом валу конечной передачи
 (Н*м)
– на валу конвейера.
(Н*м)
– на валу конвейера.
% расхождения
 допустимо ±2
допустимо ±2
Таблица 5.
Параметры кинематического расчёта привода.
Наименование валов |
Р (кВт) |
Т (Н*м) |
n (мин-1) |
ω (с-1) |
U |
0-вал электродвигателя |
5,402 |
35,717 |
1445 |
151,243 |
|
I-ведущий вал редуктора |
5,241 |
34,653 |
1445 |
151,243 |
U1=U1-2=3,5 Косозубой передачи П1 |
II-ведомый вал редуктора |
5,085 |
151,298 |
412,8 |
43,21 |
|
III-ведущий вал конической передачи |
4,933 |
151,298 |
412,8 |
43,21 |
U2=U3-4=4,5 Конической передачи П2 |
IV-ведомый вал конической передачи |
4,688 |
488,18 |
91,74 |
9,603 |
U3=U4-5=4,22 Цилиндрической передачи П3 |
V-вал конвейера |
4,502 |
1978,553 |
21,74 |
2,2754 |
|