

1. Совместная работа гребного винта и главного двигателя. Согласование их характеристик
1.1. Согласование путем изменения характеристик винта
Двигатель,
работающий на винт, не является независимым
агрегатом: его мощность может изменяться
только по винтовой
характеристике
Nе
=
![]() (n),
которая определяет для него величину
противодействующего момента. Мощность
на валу двигателя Nе,
обеспечивающую мощность Nр,
потребляемую винтом, находят по формуле
(n),
которая определяет для него величину
противодействующего момента. Мощность
на валу двигателя Nе,
обеспечивающую мощность Nр,
потребляемую винтом, находят по формуле
Nе
= Nр/
ηвηп
= 2πk2ρn![]() /ηв
ηп,
(1)
/ηв
ηп,
(1)
где
ηв,
ηп
– соответственно КПД валопровода и
передачи; k2
–безразмерный коэффициент момента; n
– частота вращения гребного винта,
сек-1;
Dв
– диаметр винта, м;
![]() – плотность забортной воды, кг/м3.
– плотность забортной воды, кг/м3.
Можно
считать, что при заданных буксировочном
сопротивлении и пропульсивном коэффициенте
скорость судна v
меняется пропорционально n,
т.е. относительная поступь винта λр
=
![]() = const.
Так как k2
также является постоянной величиной,
то можно записать Nе
= Сn3,
где С
– некоторый постоянный коэффициент.
= const.
Так как k2
также является постоянной величиной,
то можно записать Nе
= Сn3,
где С
– некоторый постоянный коэффициент.
Из изложенного следует, что при увеличении сопротивления винтовые характеристики будут круто возрастать, так как уменьшение относительной поступи винта λр приведет к росту коэффициента момента k2 и, следовательно, коэффициента С. Наиболее крутую винтовую характеристику судно будет иметь на швартовом режиме. При снижении сопротивления винтовые характеристики вследствие увеличения λр и уменьшения k2 становятся более пологими. Наиболее пологую винтовую характеристику судно имеет при ходе в балласте. Как видно, в процессе эксплуатации судна его винтовые характеристики изменяются в широких пределах.
Для анализа связи между винтом и двигателем, помимо винтовых характеристик, необходимо иметь характеристики двигателя, которые получают при стендовых испытаниях и представляются в координатах Nе – n в виде кривых, определяющих поле возможных сочетаний Nе и n.
В общем случае работа двигателя данного типа характеризуется следующими кривыми (рис. 1.1): кривая 1 устанавливает минимально устойчивую частоту вращения двигателя; кривая 2, называемая ограничительной характеристикой по номинальному крутящему моменту Мкр.н, соответствующему номинальной мощности Nен при номинальной частоте вращения nн и определяющая верхний предел длительной механической напряженности деталей двигателя; кривая 3 - регуляторная характеристика предельной частоты вращения вала двигателя, показывает частоту вращения двигателя при снижении нагрузки; кривая 4 является характеристикой холостого хода (минимальной мощности) двигателя.

Рис. 1.1. Взаимодействие гребного винта с двигателем
Внутреннего сгорания
Чтобы установить режимы совместной работы винта и двигателя, необходимо наложить винтовые характеристики на характеристики двигателя (рис. 1.1). Если винтовая характеристика для расчетного режима плавания (кривая I) проходит через точку Н с координатами Nе.н и nн, то гребной винт соответствует двигателю. С ростом сопротивления из-за увеличения осадки судна, обрастания корпуса, волнения и тому подобного изменяется винтовая характеристика «утяжеляется» (кривая II), тогда при условии недопущения перегрузки двигателя рабочая точка должна будет соответствовать точке Т. В рассматриваемом случае винт считается гидродинамически тяжелым. При «тяжелом винте» частота вращения nт двигателя меньше номинальной. С уменьшением сопротивления судна винт оказывается гидродинамически легким. Характеристика (кривая III), построенная для этого варианта, пересечет регуляторную характеристику двигателя в точке Л, которой соответствует частота вращения nл, несколько больше номинальной.
Как видно из рис. 1.1, всякое несоответствие винта двигателю связано с уменьшением располагаемой мощности двигателя и приводит к снижению скорости судна. Согласованность винта и двигателя окончательно проверяется при натурных (скоростных) испытаниях судна. Практически следует считать, что винт согласован с двигателем, если двигатель при работе на винт развивает номинальную мощность при частоте вращения, которая отличается от номинальной не более чем на 1...3%.
Для согласования винта с двигателем корректируется его шаговое отношение Н/Dв: для легкого винта – шаг увеличивается, а для тяжелого - уменьшается. Обычно гребные винты проектируют несколько облегченными по сравнению с требуемыми для идеальных условий эксплуатации (при этом имеют в виду, что по мере обрастания корпуса и увеличения сопротивления в реальных эксплуатационных условиях винт становится «тяжелее» и более соответствует главному двигателю).
В связи с тем, что принятый шаг винта соответствует только определенному режиму эксплуатации судна, на судах, которые часто меняют режим хода (промысловые суда, буксиры, паромы), вместо винтов фиксированного шага (ВФШ) применяют винты регулируемого шага (ВРШ).
Для рыбопромысловых судов в эксплуатационных условиях характерны частые изменения буксировочного сопротивления, скорости и осадки при применении орудий лова, подъеме улова на борт, приеме и расходовании топлива и воды, и других операциях. В этих изменяющихся условиях плавания ВФШ не позволяют снимать с двигателя полную мощность, что приводит к снижению скорости траления и свободного хода.
В том случае, когда нет возможности подобрать двигатель, согласованный с установленным на прототипе судна гребным винтом, возникает необходимость в корректировке элементов ГВ. Согласование ГВ с ГД можно осуществить за счет изменения шага Н и диаметра D винта. Обычно на практике согласование ГВ с ГД производится за счет изменения шага винта при неизменном его диаметре. Этот способ корректировки элементов ГВ может применяться для любого несогласованного с двигателем винта (гидродинамически легкого или тяжелого). Однако согласование ГВ с ГД за счет изменения диаметра может привести к увеличению вибрации и повышению кавитации, а также значительному уменьшению КПД винта. Поэтому этот способ корректировки винта, как правило, применяется в качестве временной меры, в основном для согласования с двигателем гидродинамически тяжелых винтов путем его «облегчения» - уменьшения диаметра.
Рассмотрим возможную методику корректировки ГВ для его согласования с ГД прототипа судна, основные данные которого по корпусу, ГВ и ГД известны [1].
Пусть на судне установлен штатный двигатель номинальной мощностью Ne1, обеспечивающий частоту вращения ГВ, равную п1 и скорость хода v1. Но этот двигатель устаревшей модификации и имеет низкую экономичность, в связи с этим его следует заменить на современную модель. По каталогам дизелестроительных фирм выбирается новый двигатель (ближайший по параметрам со штатным) номинальной мощностью Ne2 при частоте вращения вала п2. Эти параметры могут несколько отличаться от показателей исходного ГД прототипа судна. В этом случае, чтобы лучше использовать ходовые качества судна, можно прибегнуть к корректировке элементов ГВ для согласования его с ГД путем изменения шага Н или диаметра Dв, оставив остальные его характеристики (число лопастей Z и дисковое отношение θ) неизменными. Для определения шага и диаметра согласованного с ГД винта целесообразно воспользоваться существующими расчетными диаграммами - кривыми действия гребного винта, представляющими при известных Z и θ графическое изображение следующей функции:
![]() .
.
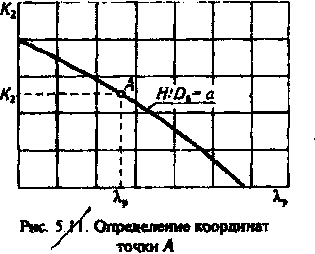
Рис. 1.2. Определение координат точки А
Допустим,
что на диаграмме
(рис
1.2) согласованному с двигателем винту
соответствует точка А с координатами
![]() и λp.
и λp.
Величина
![]() может изменяться в довольно широких
пределах, из формулы (1.1) она равна
может изменяться в довольно широких
пределах, из формулы (1.1) она равна
![]() .
(1.2)
.
(1.2)
Для
определения
![]() существует уравнение
существует уравнение
![]() ,
(1.3)
,
(1.3)
где
![]() - скорость судна, узл.;
- скорость судна, узл.;
![]() - коэффициент попутного потока, зависящий
от полноты корпуса судна, рассчитываемый
по формуле
- коэффициент попутного потока, зависящий
от полноты корпуса судна, рассчитываемый
по формуле
![]() .
(1.4)
.
(1.4)
Коэффициент
общей полноты корпуса
![]() равен
равен
![]() .
(1.5)
.
(1.5)
Взяв
данные прототипа судна (V,
L, B,
Т,
![]() ),
вычисляем по формулам (1.3)...(1.5) величины
),
вычисляем по формулам (1.3)...(1.5) величины
![]() .
.
В
случае, если номинальная мощность
выбранного двигателя
![]() отличается от величины мощности двигателя
судна-прототипа
отличается от величины мощности двигателя
судна-прототипа
![]() ,
это следует учесть при расчете новой
скорости судна, используя известную
зависимость
,
это следует учесть при расчете новой
скорости судна, используя известную
зависимость
![]() .
Определив новую скорость судна, вычисляем
значение
.
Определив новую скорость судна, вычисляем
значение
![]() по формуле (1.3).
по формуле (1.3).
Таким образом, координаты точки А определены. Она находится на кривой H/Dв = а.
По
известному для прототипа судна размеру
диаметра винта
![]() при неизменных остальных характеристиках
(Z
и
при неизменных остальных характеристиках
(Z
и
![]() )
определяем шаг откорректированного ГВ
и согласованного с ГД:
)
определяем шаг откорректированного ГВ
и согласованного с ГД:
![]() .
.
В результате ГВ будет иметь те же характеристики, что и у прототипа судна, за исключением шага Н.
Корректировку ГВ можно произвести за счет изменения его диаметра. В этом случае можно воспользоваться следующим приближенным равенством, справедливым для согласованных с ГД винтов:
![]() ,
,
где
![]() и
и
![]() - величины, на которые необходимо изменить
шаг и диаметр винта, чтобы получить шаг
и диаметр согласованного винта.
- величины, на которые необходимо изменить
шаг и диаметр винта, чтобы получить шаг
и диаметр согласованного винта.
Из этого выражения получим следующее приближенное равенство:
![]() ,
,
где D2 - новый диаметр согласованного винта при прежнем шаге Н1; С - постоянная.
Рассчитав корректировку ГВ за счет изменения шага и получив его значение Н2 при неизменном диаметре ГВ, равном D1, находим постоянную С:
![]() .
.
После чего, используя формулу, определяем диаметр откорректированного ГВ при условии сохранения его первоначального шага Н1:
![]() .
.
Примеры корректировки гребного винта для согласования его с главным двигателем [1].
Пример 1
Исходные данные прототипа судна.
Размерения корпуса судна:
объемное водоизмещение судна V = 27340м3,
длина между перпендикулярами L = 162 м,
ширина судна В = 23 м;
осадка в грузу T = 10м.
Скорость
хода в грузу
![]() = 15,3 узл.
= 15,3 узл.
Гидродинамические характеристики гребного винта:
диаметр
винта
![]() = 5,15 м;
= 5,15 м;
шаг винта H = 4,074 м;
шаговое отношение H/Dв = 0,79;
дисковое
отношение
![]() = 0,527;
= 0,527;
число лопастей Ζ = 4;
частота вращения винта n = 140 мин-1 (2,33 с-1).
1. По формуле адмиралтейских коэффициентов [2, 3] определяем требуемую мощность ГД:
![]() кВт,
кВт,
где Ca = 390…415 – адмиралтейский коэффициент, рассчитанный по судну-прототипу.
2. На судне установлен ГД устаревшей модификации и номинальной мощностью Νе1 = 8240 кВт с частотой вращения n1 = 140 мин-1 = 2,33 c-1.
3. По каталогам выбираем ближайший по параметрам с исходным ГД новый двигатель 7UEC52LA фирмы Mitsubishi номинальной мощностью Νе2 = 8240 кВт при частоте вращения вала n2 = 133 мин-1 = 2,22 с-1.
4. Произведем оценку согласованности нового двигателя с ГВ.
Разность частот вращения
![]() .
.
Следовательно, двигатель не согласован с характеристиками ГВ.
5. Подсчитаем количественную оценку несогласованности. Мощность, которую может развивать двигатель при работе на ГВ, по винтовой характеристике
 кВт,
кВт,
или
![]() ,
,
т.е. будет недоиспользоваться 14% номинальной мощности ГД. При этом снижение скорости хода судна будет равно
![]() узл.
узл.
6. Вычисляем безразмерный коэффициент момента k2; для согласованного ГВ по формуле (1.1)
![]() .
.
7.
Определяем по формуле (1.3) относительную
поступь ГВ λр,
для чего сначала рассчитываем коэффициент
общей полноты корпуса судна
![]() по формуле (1.5) и коэффициент попутного
потока ω по формуле (1.4).
по формуле (1.5) и коэффициент попутного
потока ω по формуле (1.4).
![]()
![]()
![]() .
.
8.
Выбираем по величинам Z
= 4 и
![]() = 0,527 расчетную диаграмму действия
гребного винта, на ней по координатам
k2
= 0,034 и λр
= 0,47 находим искомую точку А
на кривой Η2/D1
= 0,9 (рис. 1.3).
= 0,527 расчетную диаграмму действия
гребного винта, на ней по координатам
k2
= 0,034 и λр
= 0,47 находим искомую точку А
на кривой Η2/D1
= 0,9 (рис. 1.3).
9.
Определяем шаг откорректированного
гребного винта для диаметра D1
= 5,15 м:
![]() м.
м.

Рис. 1.3. Определение положения точки А
В результате ГВ будет иметь те же характеристики, что и у прототипа судна, за исключением шага Н.
10. Произведем корректировку винта путем изменения его диаметра.
При неизменном шаге ГВ H1 = 4,074 м определим диаметр откорректированного винта D2 через значение постоянной С:
![]() м;
м;
![]() м.
м.
Пример 2
Исходные данные прототипа судна возьмем из примера 1, т. е. пункты в данном примере 1 и 2 аналогичны пунктам 1 и 2 первого примера.
3. По каталогам подбираем новый главный двигатель 6UEC52LS фирмы Mitsubishi номинальной мощностью Ne2 =7940 кВт при частоте вращения вала n2 = 120 мин-1 = 2 с-1.
4. Произведем опенку согласованности этого двигателя с ГВ. Разность частот вращения
![]()
Следовательно, двигатель не согласован с характеристиками ГВ.
5. Рассчитаем количественную оценку несогласованности.
Мощность, которую может развивать двигатель при работе на ГВ по винтовой характеристике
 кВт.
кВт.
Использование номинальной мощности двигателя составит
![]()
При этом снижение скорости хода судна будет равно
![]() узл.
узл.
6. Вычисляем безразмерный коэффициент момента k2 для согласованного ГВ по формуле (1.1)
![]()
7.
Определяем возможную скорость хода
судна при мощности ГД, равной Ne2
=
7940 кВт, используя известную зависимость
Ne
= c![]() 3:
3:
![]() узл.
узл.
8.
При тех же значениях
![]() и
и
![]() ,
рассчитанных в примере 1, вычисляем
величину относительной поступи винта:
,
рассчитанных в примере 1, вычисляем
величину относительной поступи винта:
![]()
9.
По координатам k2
=
0.042 и
![]()
![]() на расчетной диаграмме ГВ находим
искомую точку А
на кривой H2/D1
= 0,88.
на расчетной диаграмме ГВ находим
искомую точку А
на кривой H2/D1
= 0,88.
10. Определяем шаг откорректированного ГВ:
![]() м.
м.
11. При первоначальном неизменном шаге ГВ H1=4,074 м определим диаметр откорректированного винта D2 через значение постоянной C:
![]() м;
м;
![]() м.
м.
Пример 3
Исходные данные прототипа судна возьмем из примера 1. т е. пункты 1 и 2 совпадают.
3. По каталогам подбираем новый главный двигатель 6L50MC фирмы МAN-B&W номинальной мощностью Ne2 =7940 кВт при частоте вращения вала n2 = 148 мин-1 = 2,47 с-1.
4. Произведем оценку согласованности этого двигателя с ГВ. Разность частот вращения составляет
![]()
Следовательно, двигатель не согласован с ГВ.
5. Для количественной оценки несогласованности ГД с Г В необходимо определить допустимый режим работы нового двигателя по винтовой характеристике, соответствующий точке 3 (рис. 1.4), которая расположена на пересечении винтовой характеристики I с ограничительной характеристикой II по максимальному крутящему моменту двигателя, допустимая максимальная мощность в точке 3 по закону винтовой характеристики равняется

В то же время эта мощность на ограничительной характеристике по максимальному крутящему моменту равна
![]()
где n3 - частота вращения, соответствующая режиму работы двигателя в точке 3.
Откуда
 с-1,
с-1,
следовательно,
![]() кВт.
кВт.

Рис.1.4. Определение режима работы двигателя