

5. Определение параметров и выбор элементов электропередач
Показатели электропередачи зависят от характеристик входящего в них оборудования: электрогенераторов, электросети и электродвигателей.
Суммарная
мощность главных электрогенераторов
![]() кВт,
и приводящих их ГД
кВт,
и приводящих их ГД
![]() ,
кВт, определяется по формулам
,
кВт, определяется по формулам
![]()
где
![]() -
суммарная мощность ГЭД, кВт;
-
суммарная мощность ГЭД, кВт;
![]() -
КПД электродвигателей (ηгэд
= 0,92…0,94 для двигателей постоянного тока
с Nгэд
= 600…5000 кВт, ηгэд
= 0,95…0,97 для переменного тока при Nгэд
=1000…4000 кВт и более); ηс
- КПД сети (кабельной), ηс
=
0,98…0,99; ηпр
-
КПД выпрямителей или преобразователей
частоты, ηпр
=
0,98…0,99; ηг
- КПД электрогенераторов (ηг
= 0,91…0,95 для генераторов постоянного
тока при Nг
=
300…2500 кВт и выше, ηг
= 0,95…0,975 для переменного тока при Nг
=
1000…5000 кВт и более); ηп
– КПД передачи между двигателем и
электрогенератором.
-
КПД электродвигателей (ηгэд
= 0,92…0,94 для двигателей постоянного тока
с Nгэд
= 600…5000 кВт, ηгэд
= 0,95…0,97 для переменного тока при Nгэд
=1000…4000 кВт и более); ηс
- КПД сети (кабельной), ηс
=
0,98…0,99; ηпр
-
КПД выпрямителей или преобразователей
частоты, ηпр
=
0,98…0,99; ηг
- КПД электрогенераторов (ηг
= 0,91…0,95 для генераторов постоянного
тока при Nг
=
300…2500 кВт и выше, ηг
= 0,95…0,975 для переменного тока при Nг
=
1000…5000 кВт и более); ηп
– КПД передачи между двигателем и
электрогенератором.
Массогабаритные характеристики электропередач определяются выбором по каталогам соответствующих электрических машин и электроаппаратов. При отсутствии необходимого серийного оборудования и приближенной оценке можно воспользоваться следующими зависимостями:
-
удельная масса главных электрогенераторов
![]()
- удельная масса гребных электродвигателей (при частоте вращения nгэд = 110…200 мин-1)
![]()
Ширина B, м, указанных устройств
![]() +
0,75;
+
0,75;
![]() .
.
Ориентировочная длина электрогенераторов и электродвигателей, м: L = (0,9…1,3), B – одноякорных, L = (1,2…1,3), B – двух якорных.
Для привода электрогенераторов в ДУ на ходовых режимах целесообразно использовать ГД. Частота вращения ГД на ходовых режимах может изменяться в широком диапазоне (обычно от 40% до 100% номинальной частоты) и зависит от принятой скорости судна, степени обрастания корпуса, волновой и ветровой нагрузок. В установках с ВРШ частота вращения ГД может поддерживаться стабильной изменением угла установки лопастей. Отклонение частоты вращения ГД от номинального значения при изменении условий и режимов эксплуатации может быть минимальным. В установках с ВФШ колебания частоты вращения ГД в условиях эксплуатации могут быть значительными. Данное обстоятельство затрудняет использование на судах валогенераторов переменного тока.
Для стабилизации частоты вращения электрогенераторов при изменяющейся частоте вращения ГД применяют тиристорные стабилизаторы частоты электрогенераторов и редукторы (мультипликаторы) с постоянной частотой вращения выходного вала.
Тиристорные стабилизаторы имеют сложную электронную систему управления частотой и пока не получили широкого распространения на судах. Редукторы (для МОД - мультипликаторы) с постоянной частотой вращения выходного вала выполняют планетарного типа с гидравлическим или электрическим управлением частотой вращения солнечных шестерен. На рис. 5.1 показана кинематическая схема такого редуктора с гидравлическим управлением частотой вращения вала шестерен 5. Управляющее устройство 3 электронного типа получает сигнал от информационного датчика частоты вращения 4 и путем переключения клапанов в насосе 2 изменяет частоту вращения гидравлического двигателя 1, который через шестерни связан с эпициклом ведущего вала (6, 7 - сателлиты).
Далее приведены значения частоты вращения, ведущего n1, ведомого n2 валов и вала солнечных шестерен 5 nс, мин-1:
n1 1100 1200 1250
n2 1200 1200 1200
nc 2200 1200 700
Испытания таких редукторов на стендах и в судовых условиях, даже при резких колебаниях частоты вращения вала ГД (от 75 до 104% номинальной частоты) показали, что колебания частоты вращения выходного вала редуктора не превышают 1%.
В табл. 5.1 приведены параметры судовых зубчатых передач с постоянной частотой вращения выходного вала.
Как видно, эти передачи имеют достаточно высокий КПД (94…96%) и приемлемые массогабаритные показатели. Применение их на судах с МОД позволяет снизить затраты на топливо при производстве электрической энергии на 20…30% с использованием более дешевых сортов тяжелого топлива. Срок окупаемости передач составляет два-три года.
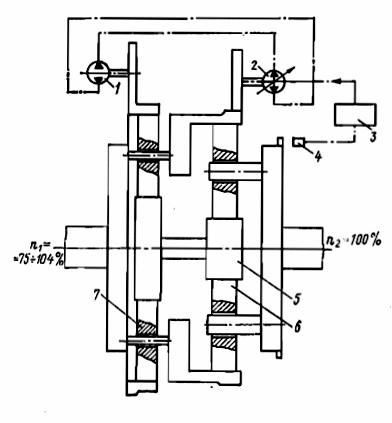
Рис. 5.1. Кинематическая схема редуктора с постоянной частотой