

2.11. Интегрирование уравнений вращательного движения
По аналогии с описанием поступательного движения можно записать кинематические уравнения в векторной форме и в координатной форме (при вращении, например, вокруг оси Z).
2.11.1. Уравнения в векторной форме
Если известна зависимость вектора углового ускорения (2.38) от времени, то, проинтегрировав ее по времени, мы получим уравнение зависимости вектора угловой скорости движения от времени:
![]() . (2.39)
. (2.39)
Если известна зависимость вектора угловой скорости (2.36) от времени, то, проинтегрировав ее по времени, мы получим кинематическое уравнение движения в векторной форме:
![]() . (2.40)
. (2.40)
Для того чтобы найти постоянные интегрирования С1 и С2, необходимо знать начальные условия движения.
В равнопеременном вращении – по аналогии с поступательным движением – кинематические уравнения можно записать в векторной форме:
 (2.41)
(2.41)
В равномерном движении при векторном описании движения
 (2.42)
(2.42)
Здесь
векторы
![]() есть начальные (в момент времени
)
значения соответствующих векторов.
есть начальные (в момент времени
)
значения соответствующих векторов.
Векторы
,
и
![]() ,
описывающие вращение а.т.т. – осевые
(аксиальные) векторы. Их направление –
условное: оно определяется по правилу
правого винта, ввинчивающегося вдоль
оси вращения. Их модуль равен значению
соответствующей физической величины
(в радианах, рад/с, рад/с2 соответственно).
,
описывающие вращение а.т.т. – осевые
(аксиальные) векторы. Их направление –
условное: оно определяется по правилу
правого винта, ввинчивающегося вдоль
оси вращения. Их модуль равен значению
соответствующей физической величины
(в радианах, рад/с, рад/с2 соответственно).
2.11.2. Уравнения в координатной форме
Если
известен вид уравнения зависимости
проекции
![]() углового ускорения на ось вращения z
от времени, то, проинтегрировав его
по времени, мы получим уравнение
зависимости проекции угловой скорости
от времени:
углового ускорения на ось вращения z
от времени, то, проинтегрировав его
по времени, мы получим уравнение
зависимости проекции угловой скорости
от времени:
![]() . (2.43)
. (2.43)
Если
известно уравнение зависимости проекций![]() угловой скорости на ось вращения z
от времени, то, проинтегрировав его по
времени, мы получим кинематическое
уравнение движения в координатной
форме:
угловой скорости на ось вращения z
от времени, то, проинтегрировав его по
времени, мы получим кинематическое
уравнение движения в координатной
форме:
![]() . (2.44)
. (2.44)
Для того чтобы найти постоянные интегрирования С1, и С2 необходимо знать начальные условия движения.
В равнопеременном движении при координатном описании движения:
 (2.45)
(2.45)
В равномерном движении при координатном описании движения:
 (2.46)
(2.46)
Здесь
величины
![]() есть начальные (в момент времени
)
значения соответствующих проекций.
есть начальные (в момент времени
)
значения соответствующих проекций.
Поступательное движение м.т. по орбите (орбитальное движение) также может быть описано уравнениями, выраженными в угловых характеристиках.
2.12. Взаимосвязь линейных и угловых характеристик движения
При осевом вращении каждая точка а.т.т. движется по орбите, т.е. ее движение является поступательным (рис. 2.11). Следовательно, угловые и линейные характеристики движения связаны друг с другом следующими соотношениями:
![]() (2.47)
(2.47)
![]() (2.48)
(2.48)
![]() (2.49)
(2.49)
![]() (2.50)
(2.50)
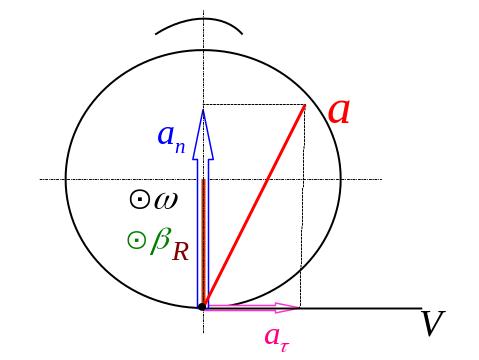
Рис. 2.18. Линейные и угловые характеристики ускоренного осевого вращения а.т.т. (или орбитального движения м.т.)
Контрольные вопросы
1. Как связаны компоненты скорости и ускорения материальной точки с производными ее координат по времени?
2. Может ли криволинейное движение быть равномерным?
3. Чему равно скалярное произведение скорости и ускорения в случае равномерного движения по окружности? как со временем меняется вектор линейного ускорения?
4. Что характерно для скоростей и ускорений точек тела, движущегося поступательно?
5. Материальная точка равнозамедленно движется по окружности. Как направлены векторы угловой скорости, углового ускорения, тангенциального, нормального и полного ускорений? Как с течением времени меняется угол между линейным ускорением и радиусом-вектором?
6. Может
ли движущееся тело иметь векторы
![]() ,
все время направленные в противоположные
стороны?
,
все время направленные в противоположные
стороны?