

2.6.2. Уравнения в векторной форме
Если известна зависимость вектора ускорения (2.14) от времени, то, проинтегрировав ее по времени, мы получим уравнение зависимости вектора скорости движения от времени:
![]() . (2.22)
. (2.22)
Если известна зависимость вектора скорости (2.9) от времени, то, проинтегрировав ее по времени, мы получим кинематическое уравнение движения в векторной форме:
![]() . (2.23)
. (2.23)
Для того чтобы найти постоянные интегрирования С1 и С2, необходимо знать начальные условия движения.
В равнопеременном движении при векторном описании движения
 (2.24)
(2.24)
В равномерном движении при векторном описании движения
 (2.25)
(2.25)
Здесь
векторы
![]() есть начальные (в момент времени
)
значения радиуса-вектора и вектора
скорости соответственно.
есть начальные (в момент времени
)
значения радиуса-вектора и вектора
скорости соответственно.
Векторы
![]() и
и
![]() ,
описывающие поступательное движение
м.т., есть полярные (линейные)
векторы. Их направление –
естественное: оно задается направлением
и характером движения.
,
описывающие поступательное движение
м.т., есть полярные (линейные)
векторы. Их направление –
естественное: оно задается направлением
и характером движения.
2.6.3. Уравнения в траекторной форме
При траекторном описании движения уравнение зависимости арифметической величины скорости движения от времени мы получим при интегрировании по времени зависимости ускорения (2.17) от времени:
![]() . (2.26)
. (2.26)
Если известна зависимость арифметической величины скорости (2.12) от времени, то, проинтегрировав ее по времени, мы получим кинематическое уравнение движения в траекторной форме, т.е. зависимость пути от времени:
![]() . (2.27)
. (2.27)
Для того чтобы найти постоянные интегрирования С1 и С2, необходимо знать начальные условия движения.
В равнопеременном движении при траекторном описании движения:
 (2.28)
(2.28)
Здесь
величины
![]() есть начальные (в момент времени
)
значения пути и арифметической величины
скорости соответственно.
есть начальные (в момент времени
)
значения пути и арифметической величины
скорости соответственно.
В равномерном движении при траекторном описании движения:
 (2.29)
(2.29)
Здесь величины есть начальные (в момент времени ) значения пути и арифметической величины скорости соответственно.
2.7. Особенности описания криволинейного движения
При
криволинейном движении вектор изменения
скорости
можно разложить на вектор
![]() ,
направленный по касательной к траектории,
и вектор
,
направленный по касательной к траектории,
и вектор
![]() ,
направленный по нормали к траектории
(рис. 2.11
и 2.12). На этом
рисунке
–
тангенциальный орт,
,
направленный по нормали к траектории
(рис. 2.11
и 2.12). На этом
рисунке
–
тангенциальный орт,
![]() –
нормальный орт.
–
нормальный орт.
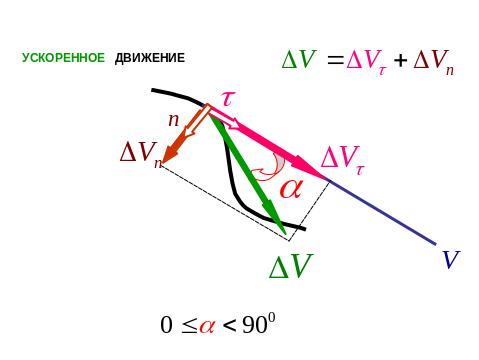
а
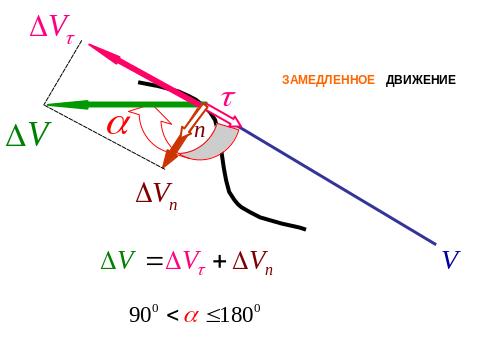
б
Рис. 2.11 и 2.12. Тангенциальная и нормальная составляющие изменения скорости при ускоренном и замедленном движении
Физический
смысл тангенциального и нормального
ускорений. Так как вектор скорости
направлен по касательной к траектории
,
то вектор ускорения
может быть представлен как сумма
тангенциальной (касательной)
![]() и нормальной
и нормальной
![]() составляющих (рис. 2.13 и
2.14):
составляющих (рис. 2.13 и
2.14):
 (2.30)
(2.30)
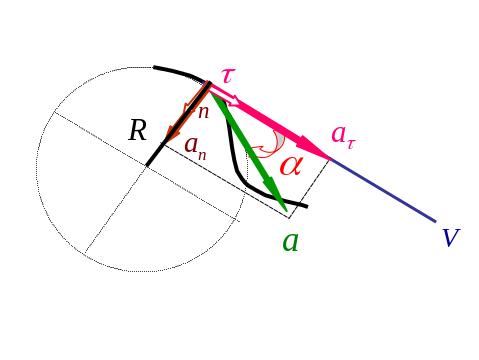
Рис. 2.13. Тангенциальное и нормальное ускорения при ускоренном движении
б
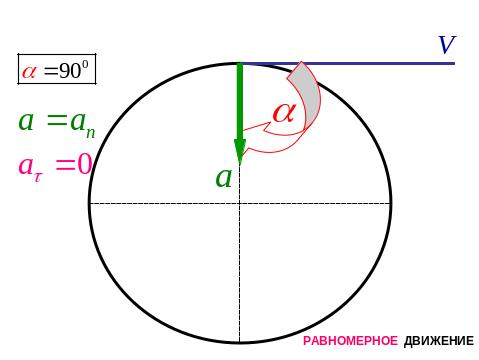
Рис. 2.14. Тангенциальное и нормальное ускорения: при равномерном движении м.т. по окружности
нормальное ускорение характеризует быстроту изменения скорости по направлению:
![]() . (2.31)
. (2.31)
тангенциальное ускорение характеризует быстроту изменения скорости по модулю (табл. 2.1):
![]() . (2.32)
. (2.32)
Таблица 2.1
|
|
Движение |
Траектория |
0 0 0 0 |
0 0 0 0 |
Равномерное Переменное Равномерное Переменное |
Прямолинейная Прямолинейная Криволинейная Криволинейная |