

7.2. Частные случаи приведения пространственной системы сил
Если при приведении системы сил к динамическому винту главный момент динамы оказался равен нулю, а главный вектор отличен от нуля, то это означает, что система сил приведена к равнодействующей, причем центральная ось является линией действия этой равнодействующей.
Выясним, при каких
условиях, относящихся к главному вектору
и главному моменту
,
это может быть. Поскольку главный момент
динамы
равен составляющей главного момента
,
направленной по главному вектору, то
рассматриваемый случай
![]() означает, что главный момент
перпендикулярен главному вектору, т.е.
означает, что главный момент
перпендикулярен главному вектору, т.е.
![]() .
Отсюда непосредственно вытекает, что
если главный вектор
не равен нулю, а второй инвариант равен
нулю,
.
Отсюда непосредственно вытекает, что
если главный вектор
не равен нулю, а второй инвариант равен
нулю,
![]() ,
,
(7.9) то рассматриваемая система
приводится к равнодействующей.
,
,
(7.9) то рассматриваемая система
приводится к равнодействующей.
В частности, если
для какого-либо центра приведения
,
а
![]() ,
то это означает, что система сил приведена
к равнодействующей, проходящей через
данный центр приведения; при этом условие
(7.9) также будет выполнено.
,
то это означает, что система сил приведена
к равнодействующей, проходящей через
данный центр приведения; при этом условие
(7.9) также будет выполнено.
Обобщим приведенную ранее теорему о моменте равнодействующей (теорему Вариньона) на случай пространственной системы сил.
Если пространственная система сил приводится к равнодействующей, то момент равнодействующей относительно произвольной точки равен геометрической сумме моментов всех сил относительно той же точки.
Пусть система сил имеет равнодействующую и точка О лежит на линии действия этой равнодействующей. Если приводить заданную систему сил к этой точке, то получим, что главный момент равен нулю.
Возьмем какой-либо
другой центр приведения
![]() ;
тогда
;
тогда
![]() .
(7.10) С другой стороны, на основании
формулы (4.14) имеем
.
(7.10) С другой стороны, на основании
формулы (4.14) имеем
![]() ,
(7.11)
так как
.
Сравнивая выражения (7.10) и (7.11) и учитывая,
что в данном случае
,
(7.11)
так как
.
Сравнивая выражения (7.10) и (7.11) и учитывая,
что в данном случае
![]() ,
получаем
,
получаем
![]() .
(7.12) Таким образом, теорема доказана.
.
(7.12) Таким образом, теорема доказана.
Пусть при каком-либо
выборе центра приведения
![]() ,
,
![]() .
Так как главный вектор не зависит от
центра приведения, то он равен нулю и
при любом другом выборе центра приведения.
Поэтому главный момент не меняется при
перемене центра приведения, и,
следовательно, в этом случае система
сил приводится к паре сил с моментом
.
.
Так как главный вектор не зависит от
центра приведения, то он равен нулю и
при любом другом выборе центра приведения.
Поэтому главный момент не меняется при
перемене центра приведения, и,
следовательно, в этом случае система
сил приводится к паре сил с моментом
.
Составим теперь таблицу всех возможных случаев приведения пространственной системы сил:
|
|
|
|
Случай приведения |
1 |
|
|
|
Динамический винт |
2 |
|
|
|
Равнодействующая |
3 |
|
|
|
Пара сил |
4 |
|
|
|
Система сил эквивалентна нулю |
Если все силы
находятся в одной плоскости, например,
в плоскости
![]() ,
то их проекции на ось
,
то их проекции на ось
![]() и моменты относительно осей
и моменты относительно осей
![]() и
и
![]() будут равны нулю. Следовательно,
будут равны нулю. Следовательно,
![]() ,
,
![]() ,
,
![]() .
.
Внося эти значения в формулу (7.5), найдем, что второй инвариант плоской системы сил равен нулю.
Тот же результат мы получим и для пространственной системы параллельных сил. Действительно, пусть все силы параллельны оси . Тогда проекции их на оси , и моменты относительно оси будут равны нулю. Отсюда
![]() ,
,
![]() ,
,
![]() .
.
Пользуясь снова формулой (7.5), найдем .
На основании доказанного можно утверждать, что плоская система сил и система параллельных сил в пространстве не приводятся к динамическому винту.
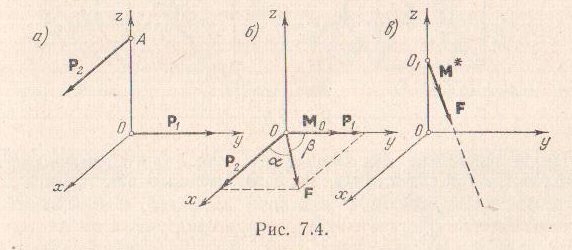
Задача 7.1. Систему двух сил
![]() и
и
![]() ,
направленных параллельно осям
и
,
как указано на рис. (расстояние между
точками приложения сил равно
,
направленных параллельно осям
и
,
как указано на рис. (расстояние между
точками приложения сил равно
![]() ),
требуется привести к динаме, определив
главный вектор и главный момент динамы.
Найти углы
,
),
требуется привести к динаме, определив
главный вектор и главный момент динамы.
Найти углы
,
![]() и
,
составляемые нейтральной осью системы
с координатными осями, а также уравнение
нейтральной оси.
и
,
составляемые нейтральной осью системы
с координатными осями, а также уравнение
нейтральной оси.
Решение. Возьмем за центр приведения начало координат О. Проекции главного вектора на оси координат будут
![]() ,
,
![]() ,
.
,
.
Модуль главного вектора
![]() .
.
Направляющие косинусы главного момента равны
![]() ,
,
![]() ,
,
![]() .
.
Найдем проекции главного момента на оси координат:
![]() ,
,
![]() ,
.
,
.
На рис. показано расположение главного вектора и главного момента для центра приведения О.
Проекцию главного момента на направление главного вектора определим по формуле
![]() .
.
Уравнение центральной оси (7.8) имеет вид
![]() .
.
Отсюда следует, что центральная ось является линией пересечения плоскостей
![]() ,
,
![]() .
.
На рис.7.4 показано расположение этой
оси
![]() .
.
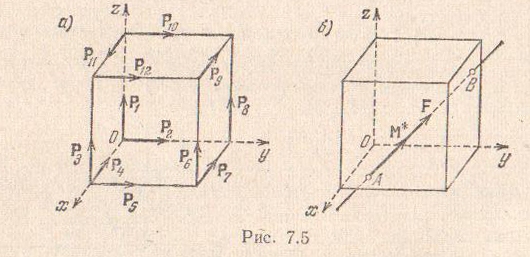
Задача 7.2. По ребрам куба со стороной
![]() действуют двенадцать равных по модулю
сил, как показано на рис. Привести систему
к простейшему виду.
действуют двенадцать равных по модулю
сил, как показано на рис. Привести систему
к простейшему виду.
Решение. За центр приведения возьмем начало координат О и вычислим проекции главного вектора и главного момента на координатные оси. Имеем
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
где – общее значение модуля заданных сил.
По формулам (7.4) и (7.5) найдем значения статических инвариантов
![]() ,
,
![]() .
.
Так как второй инвариант положителен, то система сил приводится к правому динамическому винту (главный вектор и момент направлены в одну сторону). Модуль момента найдем по формуле (7.6):
![]() .
.
Напишем уравнение центральной оси (7.8):
![]() .
.
Отсюда видно, что центральная ось системы представляет линию пересечения плоскостей
![]() ,
,
![]() .
.
Подставляя в эти уравнения сначала
![]() ,
а затем
,
а затем
![]() ,
найдем точки пересечения центральной
оси с нижней и боковой гранями куба
,
найдем точки пересечения центральной
оси с нижней и боковой гранями куба
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Таким образом, динамический винт,
эквивалентный данной системе сил,
состоит из силы
,
модуль которой равен
![]() ,
и пары сил с моментом
,
коллинеарным силе
и численно равным
,
и пары сил с моментом
,
коллинеарным силе
и численно равным
![]() .
Центральная ось и составляющие
динамического винта показаны на рис.
.
Центральная ось и составляющие
динамического винта показаны на рис.